Applied AI and Robotics with NVIDIA Jetson Nano
Applied AI and Robotics with NVIDIA Jetson Nano provides a hands-on, project-based introduction to the fundamentals of artificial intelligence, machine learning, perception, and autonomy within real-world contexts.
This course leverages a scaffolded series of interactive labs and the NVIDIA Jetson Nano on the JetBot platform to cover core AI and ML techniques – Classification, Regression, Transfer Learning, and Reinforcement Learning – applied to robotic tasks like Collision Avoidance, Path Following, and Autonomous Racing. Learners gain a generalizable understanding of how AI enables robots to perceive and autonomously interact with their environment.
Applied AI and Robotics is broken up into 5 different units. Within the units, students will engage with their robot and learn core concepts through step-by-step, media-driven instructional content, “Try It” remix activities, mini-challenges, “Check Your Understanding” questions, a culminating end-of-unit challenge to apply what they have learned, and an end-of-unit quiz.
 |
Autonomous Systems are comprised of hardware and software enabling machines to operate independently. In this unit, participants will configure their JetBot, including software, network requirements, assembly, and initial operation. |
 |
Autonomous systems like the JetBot can be configured to navigate using pre-programmed routines, operator teleoperation, or a blend of both. This unit guides participants through motion control, precise navigation techniques, and teleoperation. |
 |
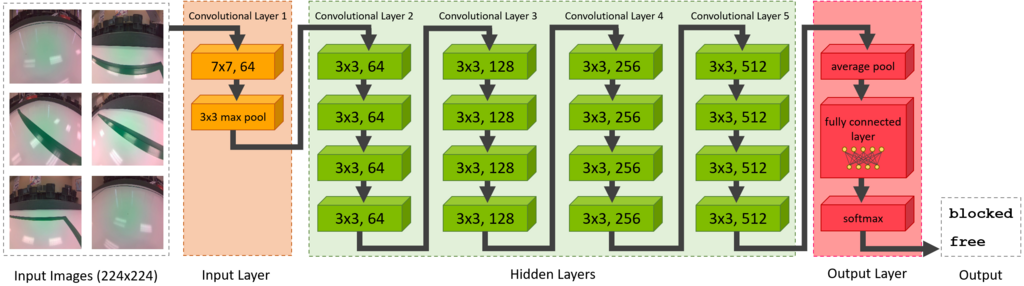
To prepare to navigate unknown environments, autonomous systems are often trained with data from known environments. This unit emphasizes the importance of data collection and labeling for applications like Collision Avoidance and Path Following. Participants will perform supervised learning techniques, utilizing Classification for detecting obstacles and Regression for path prediction. |
 |
Reinforcement Learning is a type of machine learning where a robot learns to make decisions through trial-and-error. In Autonomous Racing, the robot learns through trial-and-error as it drives on the track. In this unit, participants collect data from the track, train and visualize the base model, and then provide feedback to the robot as it learns to race. |
 |
AprilTags are a special type of marker that allows a robot to know its precise position (localization) and orientation (pose estimation) for accurate navigation. In this unit, participants calibrate the camera to improve AprilTag detection accuracy and leverage ROS (Robot Operating System) to perform waypoint navigation with the AprilTag markers. |
Required Materials
Robot Hardware and Software
- Jetson Nano Developer Kit: https://developer.nvidia.com/buy-jetson?product=jetson_nano&location=US
- 1x 64 GB Micro SD Cards and Micro SD Card Reader
- Waveshare Jetbot AI Kit: https://www.waveshare.com/product/ai/robots/mobile-robots/jetbot-ros-ai-kit.htm?sku=23755
- Note: alternative kits are available: https://jetbot.org/master/third_party_kits.html
- 3x 18650 Rechargeable Batteries
- USB Keyboard
- USB Mouse
- HDMI Monitor and Cable
- Laptop (up-to-date Windows PC or Mac)
- Internet access for Laptop and Jetson Nano
The following is recommended in order to take this course:
- USB Video Capture Card to HDMI: https://www.amazon.com/Capture-Fulfalic-Editing-Streaming-Teaching/dp/B0BJ2YDV7Q
- Note: alternatives available
Other Materials
- Building Block City Street Plates: https://www.amazon.com/Plates-Building-Attached-Double-Sided-Baseplates/dp/B096MJX2WF
- Note: alternatives available
- Electrical or Painter's tape
- Open areas for the robot to safely move
- Small, colored objects for the robot to manipulate
- Boxes or other objects to serve as barriers and obstacles
- Meter sticks
- Protractors