2021 Remake Learning Days
By Vu Nguyen & Jesse Flot
We were fortunate enough to be able to provide a few different events over the course of a week:
- Machine Vision
- Celebration of Creating a Video Game
- Virtual Robot Programming
Machine Vision Session
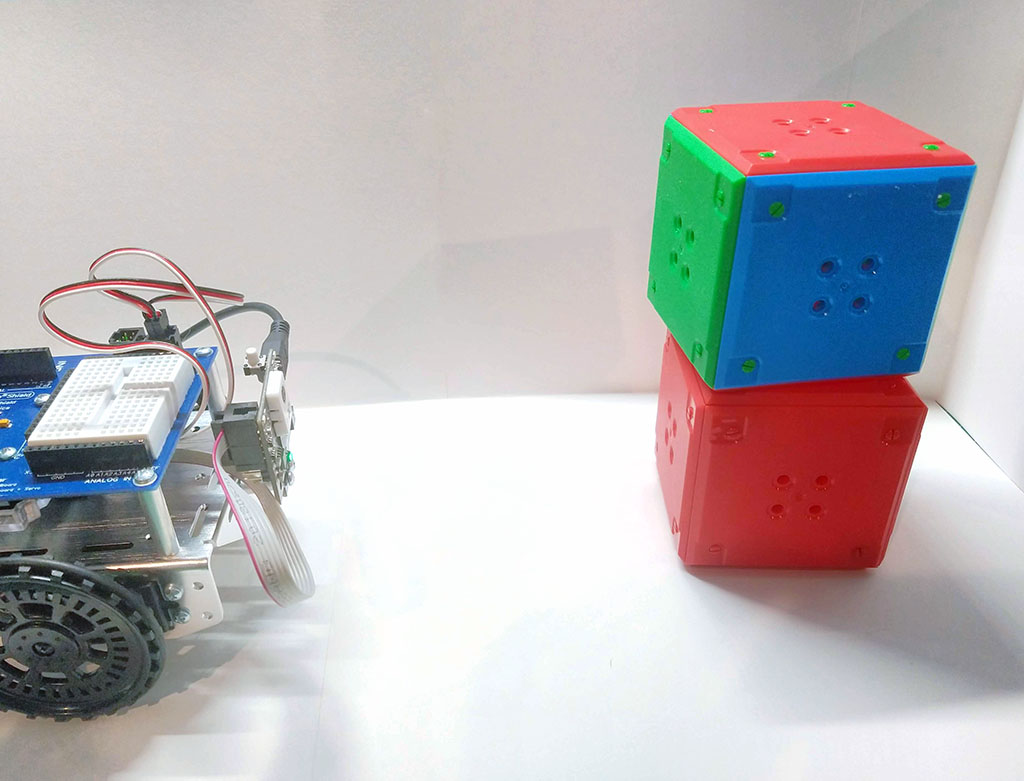
In this session, we worked with students to help them understand what Machine Vision is, how it works, and how it is impacting the way that we work. First, we showed students how a real camera sensor connected to an Arduino can send information over the Internet to a dashboard when the camera detects unexpected objects.
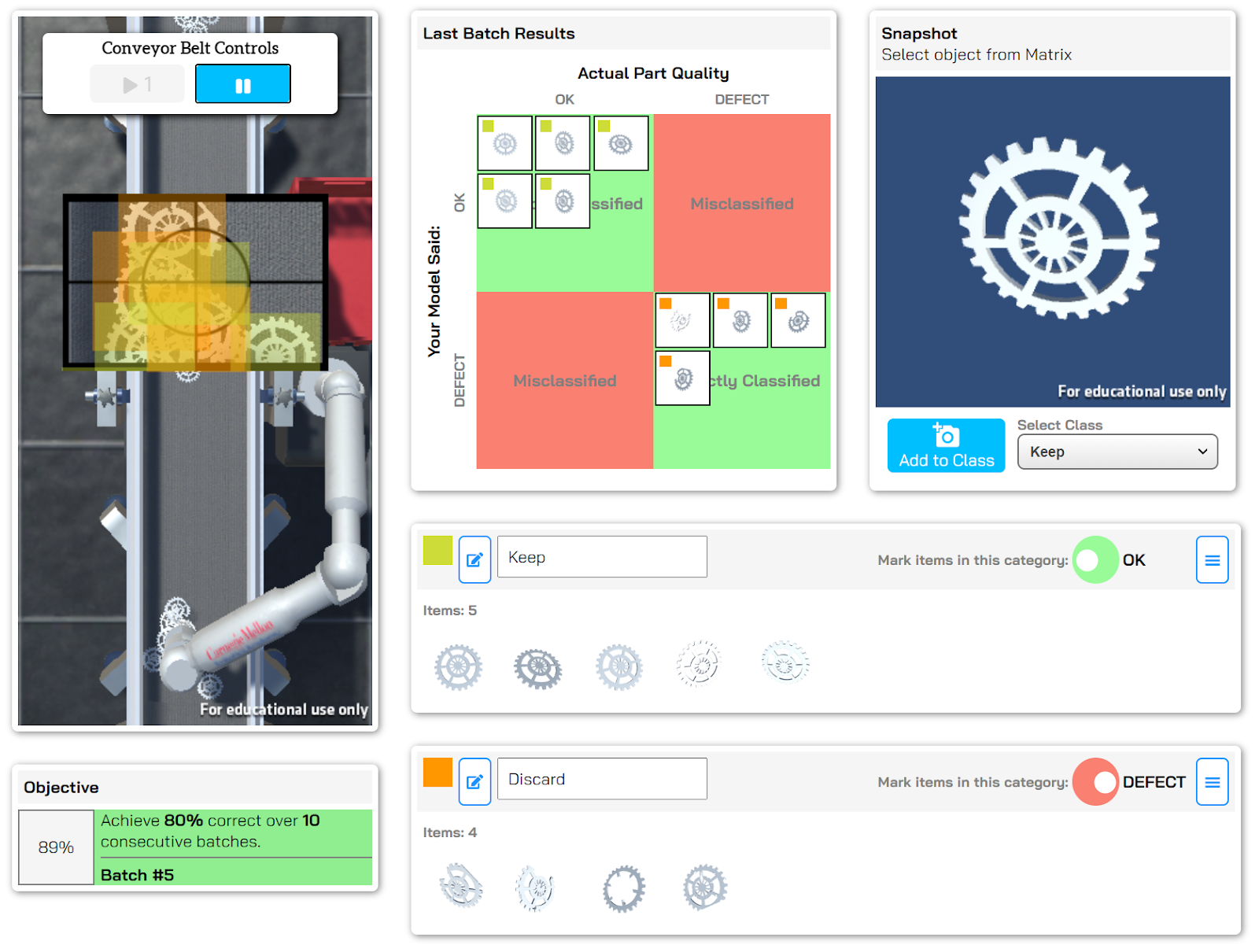
Then, we demonstrated how our simulated machine vision system can perform visual quality control checks on parts coming off an assembly line. Students learned first hand how the machine vision system worked by monitoring the output and “teaching” it when it has made mistakes until it was able to reliably tell the difference between quality and faulty components.
Session materials are freely available through our CS-STEM Network site. This material is based upon work supported by the National Science Foundation under Grant Number 1937063.
Celebration of Creating a Video Game
This session was a celebration of the amazing work that the kids at the Boys & Girls Clubs of Western PA did over the course of 20 weeks with researchers at CMRA and HCII. Instead of reading about it, watch this video! The video summarizes the co-design process, and demos the video game that was produced.
Play the game for yourself at: https://www.bit.ly/slimebattle!
Super Slime Battle was created during the Player-programmed Partner Games (P3G) project. P3G is a Carnegie Mellon University project that gets students thinking about programming a "cobot" partner to accomplish a shared goal. This material is based upon work supported by the National Science Foundation under Grant Number 1906753.
Virtual Robot Programming
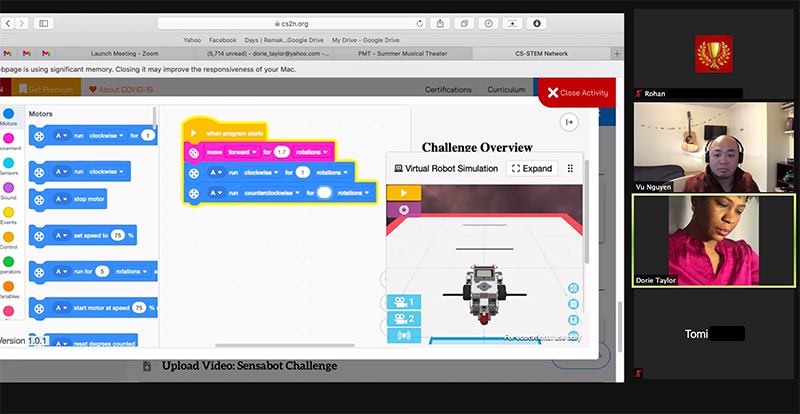
For this session, we introduced all the learners to the Virtual EV3 Sensabot challenge! But first, we had to go through some introductory steps so that we could learn how to make the robot make some movements. Specifically, we needed to learn how to make the robot move forward, move forward to specific distances, and move its arm. The robot simulates a real-world robot called the Sensabot, which was created in order to move to locations within a facility, and inspect the pipes along the way at certain waypoints:

By contextualizing the things that they’re learning with a real-world robot, learners can get a better sense of why they’re learning these behaviors.