CMU Leaves Marks on Mars
Wheels tested at CMU are driven on red planet
By Jason Maderer
Wearing 3D glasses and sitting at the flight operations console in Pasadena, California, Carnegie Mellon University graduate Vandi Verma studies the contours and rocks that litter a barren landscape no human has ever visited. With a series of keystrokes and careful planning, she puts a six-wheeled, 2,260-pound vehicle in motion, 130 million miles away from Mission Operations at NASA’s Jet Propulsion Lab (JPL).
Verma is one of only a handful of people who drive Perseverance, the newest rover on Mars. And for the past few weeks, she has been a part of the team that is sending the Ingenuity helicopter on its historic flights.
“I have one of the coolest jobs in the world,” said Verma, who earned her Ph.D. from CMU’s Robotics Institute in 2005. “You get to be one of the first people to see the images when they return to Earth and drive on terrain no one has ever seen before.”
Perseverance, which touched down on the red planet in February, will spend at least one Mars year — nearly 700 Earth days — searching for signs of ancient life. The rover will drill rocks and leave behind samples that will eventually be returned to Earth.
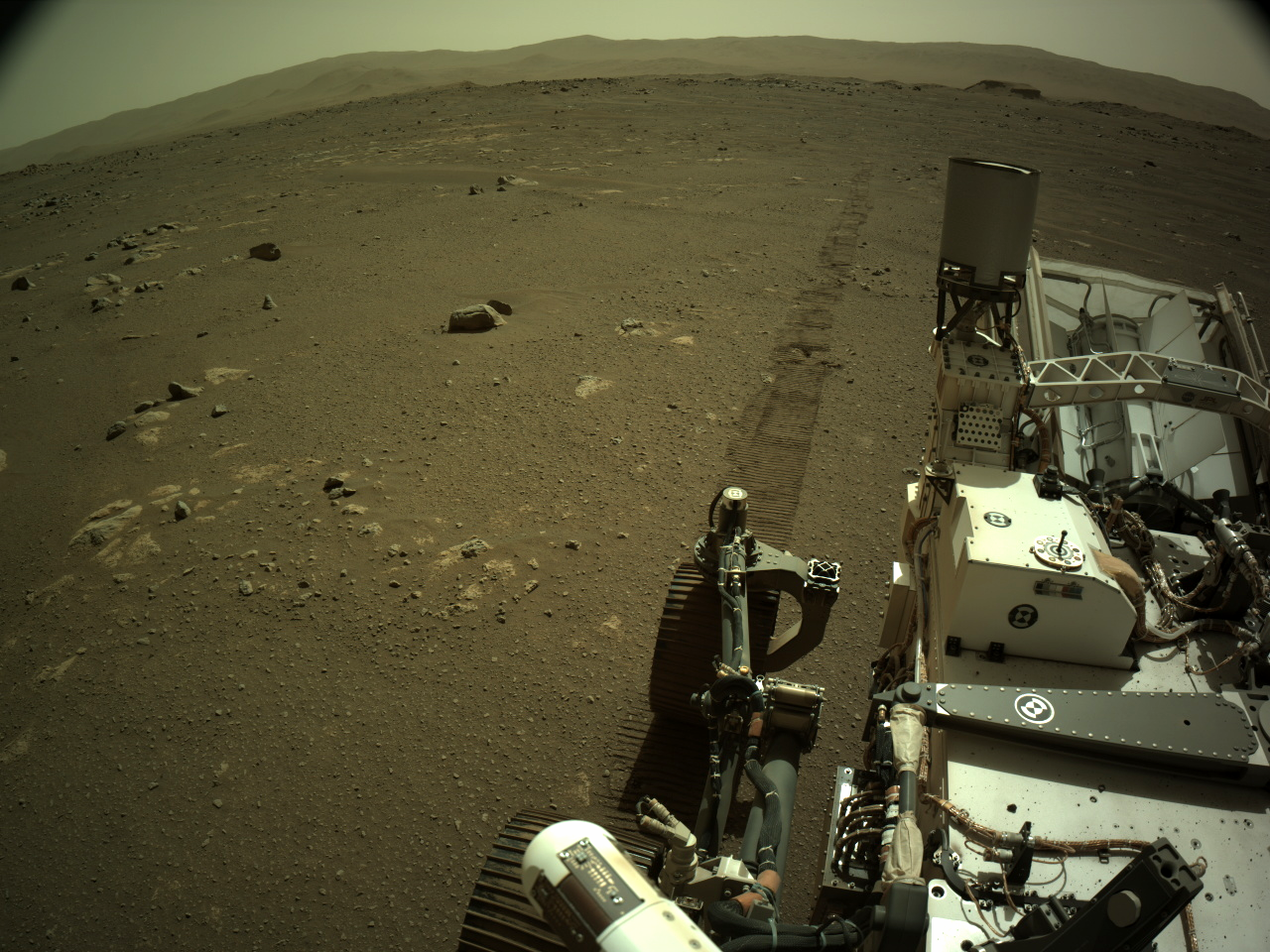
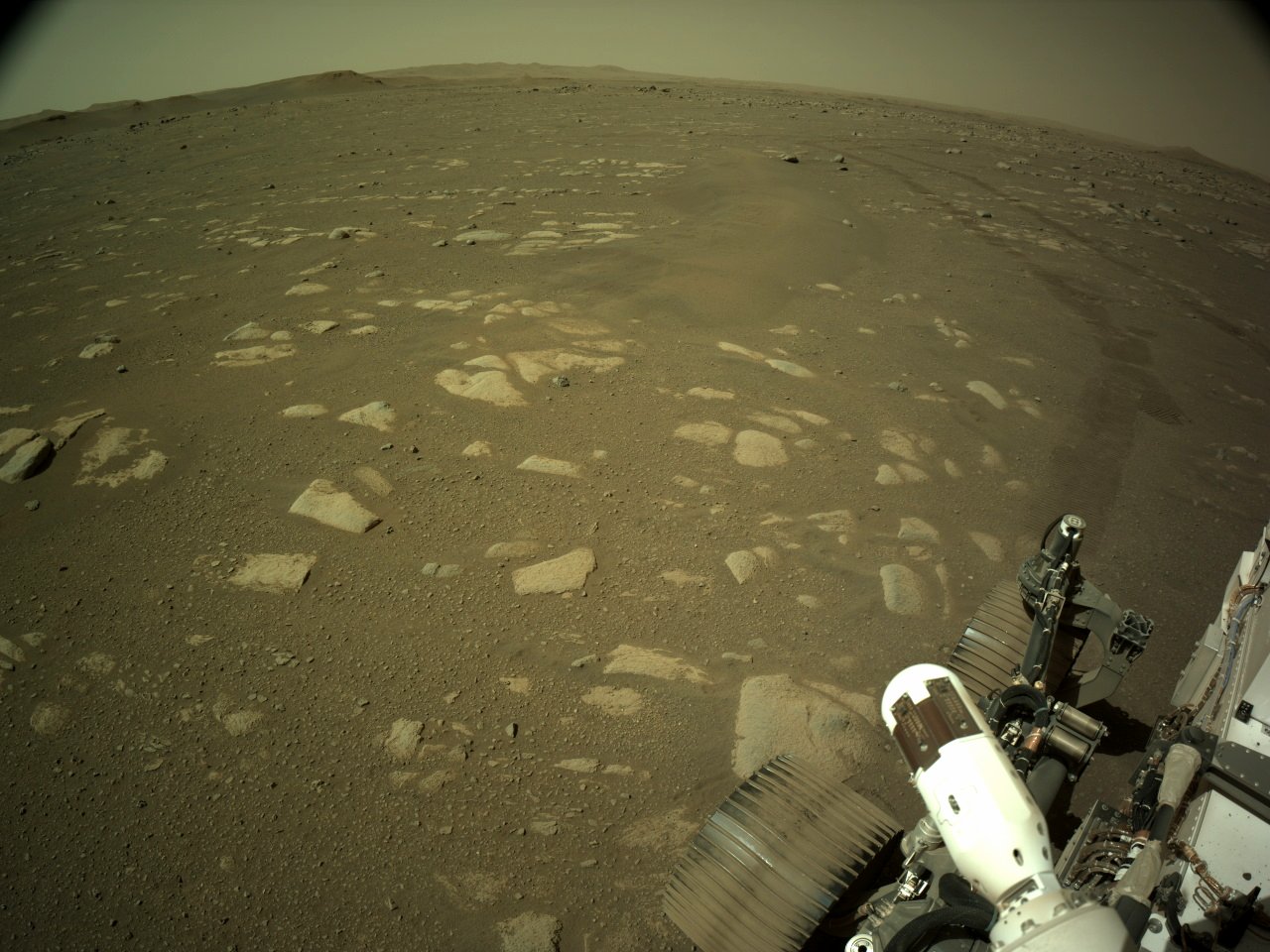
It’s a mission that includes Verma and more than a dozen other Carnegie Mellon graduates. The tracks she’s putting on Mars are made by wheels designed and tested at CMU. It’s the latest chapter in the university’s partnership with JPL.
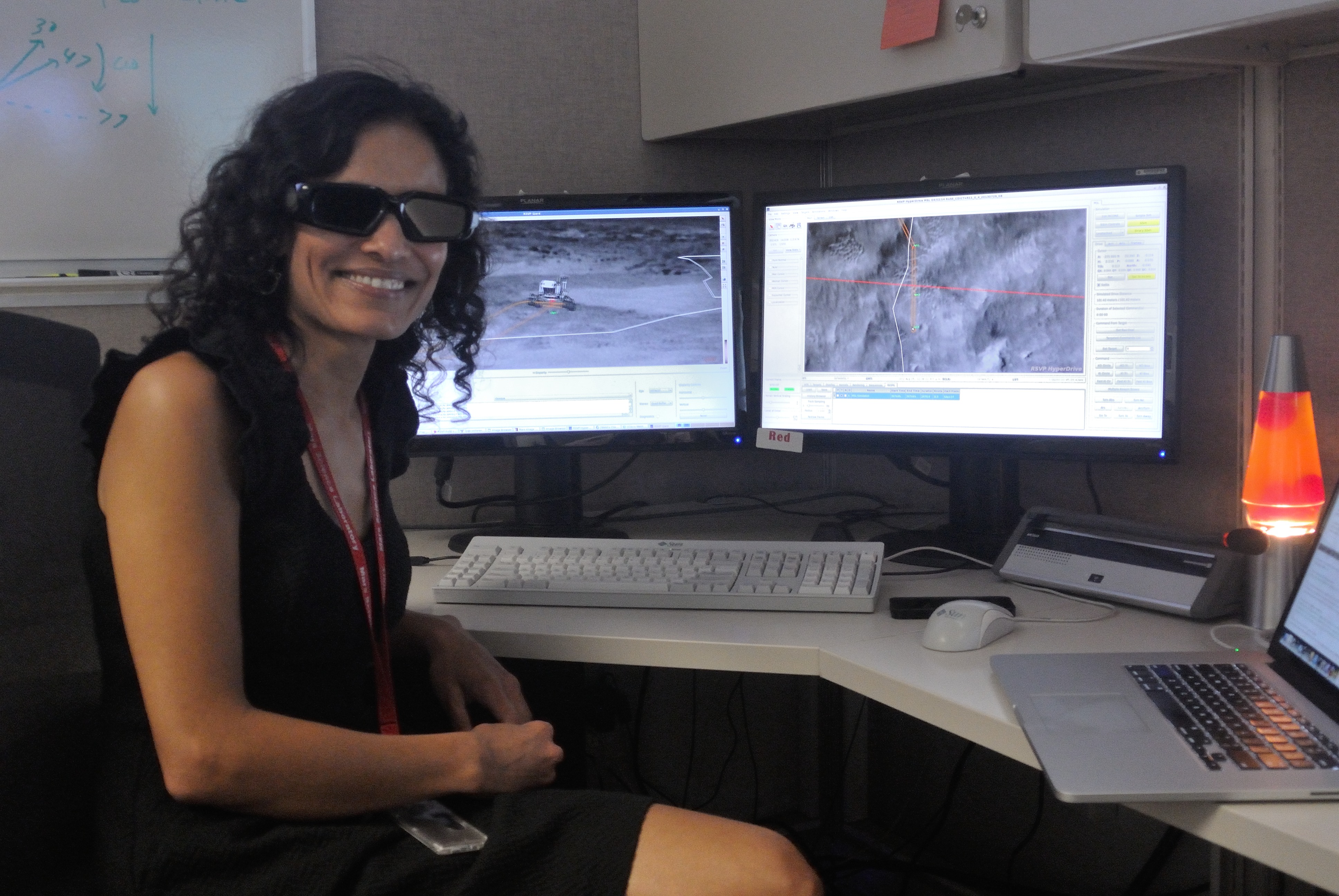
Vandi Verma
Redesigning the Wheel Together
Carnegie Mellon joined JPL’s Strategic University Research Partnership in 2005 and is one of just 14 universities in the group. The collaboration provides opportunities for research sabbaticals and internships in Pasadena. It also distributes research subcontracts to universities to partner with JPL on technology development for potential future NASA planetary missions.
The partnership created a pathway into the high bay in CMU’s Gates Center. For years, students led by Robotics Institute Research Professor David Wettergreen have tested wheels for rovers that have explored Mars.
In 2014, JPL found dents and holes in the 20-inch aluminum wheels rolling across the planet on the Curiosity rover. The wear and tear was expected, but the acceleration of the damage after just a year of exploration surprised JPL. Rougher-than-expected terrain was the culprit.
However, JPL knew it needed a better solution for its next rover. So the lab called Carnegie Mellon, then sent one of Curiosity’s wheels to Wettergreen’s team.
“We did extensive tests to determine a baseline for design of the Perseverance wheel,” Wettergreen said. “JPL tasked us with increasing the tractive performance — the slope climbing — and durability without increasing the wheel’s mass.”
Thus began a two-year, back-and-forth exchange of ideas, data and large packages between Pasadena and Pittsburgh. Nearly every month, students would unpack boxes and assemble wheels, which would then be fastened above a 3-meter sand pit in CMU’s Planetary Robotics Lab.
The team would slowly move each wheel through Mars soil simulant while computers measured traction and slippage. Test results would guide design changes back at JPL. New wheels were 3D printed in California, and more boxes would arrive at CMU. A total of 36 were shipped. Finally, after nearly 800 tests, Perseverance had its six newly designed wheels.
Molly Whittaker, who received her master’s degree in civil engineering from CMU in 2018, remembered carrying JPL’s large boxes, sometimes as big as 4-by-4 feet, into the lab. Now she’s seeing the wheels she designed and tested move on Mars.
“I joined CMU’s Planetary Robotics Lab not really knowing what I wanted to do after graduation,” said Whittaker, who now programs video games as a software engineer in eastern New York. “This project was a big part of my life and helped me figure out my future. It’s beautiful to see on Mars. It’s validation of everything I did at CMU.”
The team worked closely with researchers at JPL led by Scott Moreland, who earned his mechanical engineering Ph.D. from Carnegie Mellon in 2013.
“It’s great to see Perseverance rolling,” said Moreland, the robotic vehicles and manipulators group leader at JPL. “I’m not expecting any issues, but it’s nice to confirm things are going as expected, especially after the landing. The wheels take the brunt of the touchdown. It’s all in a day’s work, but it’s certainly exciting.”

Molly Whittaker
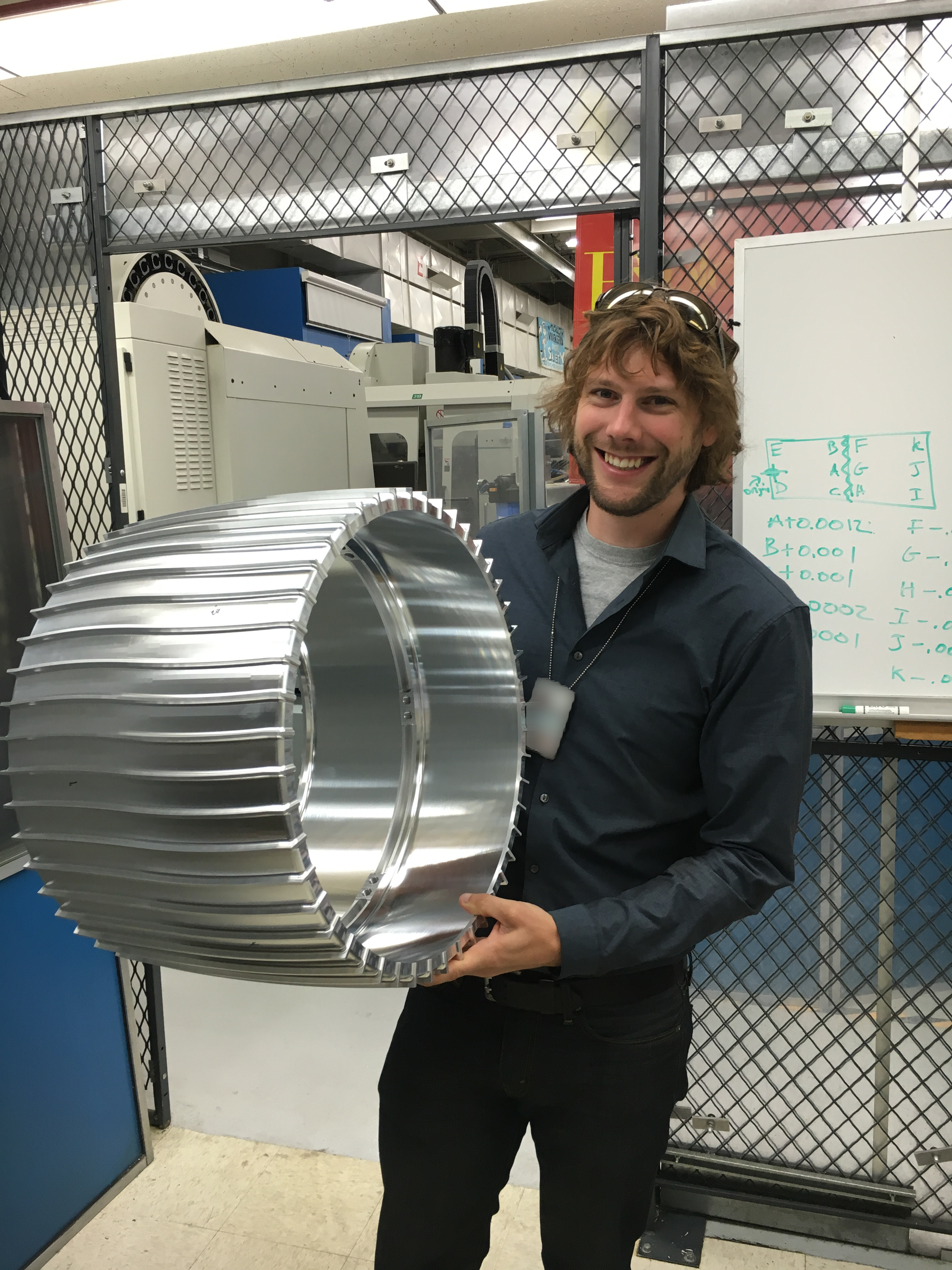
Scott Moreland
More Than a Drive
Driving a Mars rover isn’t a normal 9-to-5 job.
“Clocks on Earth aren’t the only ones that matter to us,” Verma said. “Our team lives on Martian time.”
A day on Mars, a sol, is 40 minutes longer than an Earth day. And because Verma and the rest of the rover planners must work through the night — the Martian night — to plan and program the next sol’s drive, they synchronize their daily schedules and clocks to match Perseverance.
“When it’s dark on Mars, we’re examining the previous day’s data and looking at images that are transmitted to California. We map out where we want to go and what we want to do when the sun comes up again.”
Perseverance is the fourth rover Verma has driven — she has also controlled Spirit, Opportunity and Curiosity — but driving is only part of the job. She is the chief engineer of Robotic Operations. The team also controls the robotic arm and the sampling system, including a drill, a second sample-handling robotic arm and interface to the Ingenuity helicopter. Knowing how and when to use them while seeing new terrain is crucial. It’s a skill she learned at CMU.
“Carnegie Mellon was fantastic preparation for a lot of space robotics we do at JPL,” she said. “In addition to the academic robotic teaching, the university allows students like me to actually build and work with full-scale robots. CMU doesn’t just build robots for use in a lab. We actually brought them into real-world environments.”
“Endowing a robot with autonomy is extremely important, especially when you typically are able to talk to the rover only one time a day. In this case, the rover can determine which data are relevant and discover something that scientists wouldn’t have otherwise.”
David Thompson, 2008 alumnus of the Robotics Institute
Learning in Earth’s Martian Deserts
Verma and her JPL colleague David Thompson were Ph.D. students at the same time. They participated in the Life in the Atacama project led by Wettergreen, visiting the deserts of Chile with a robot named Zoë.
Their goal, nearly 20 years ago, was to allow the machine to explore on its own — to think for itself as it examined rocks and soil. By learning which data were useful to the research team, the robot could choose where to stop and probe, even if it wasn’t in the
original commands.
Perseverance now has that same skill as it explores terrain that is not so dissimilar from the Atacama Desert. The rover’s autonomous learning algorithm was created and uploaded by Thompson.
“Endowing a robot with autonomy is extremely important, especially when you typically are able to talk to the rover only one time a day,” said Thompson, who received his Ph.D. from the Robotics Institute in 2008. “In this case, the rover can determine which data are relevant and discover something that scientists wouldn’t have otherwise.”
Now that their contributions have successfully reached Mars, both Thompson and Moreland are turning their efforts toward future JPL-NASA missions. The same is true for Wettergreen. JPL has already been in touch about testing for the next mission, which will some day land on the red planet, retrieve the soil collections left behind by Perseverance and return them to Earth.
As those efforts unfold, Verma and her fellow planning team members continue trailblazing the path for others to follow.
“We have a helicopter flying around and looking down at rover tracks we made — on Mars,” she said. “Working on mission development for years — creating algorithms, writing flight software, testing and planning — makes you intimately familiar with uncertainty. This mission is going to take us into a new era of space exploration, and I’m looking forward to a future where we’re operating autonomous aerial, ground and submersible robots alongside humans on Mars, the Moon, Venus, Europa, Titan, Triton and more.”

David Thompson

