
Dr. Cameron N. Riviere
Research Professor, Robotics and Biomedical Engineering
- Newell Simon Hall 3107
- 412 268 3083
- 412 268 7350
Newell Simon Hall 3107
Carnegie Mellon University
5000 Forbes Avenue
Pittsburgh, PA 15213
Education
- B.S. (Aerospace Engineering) & B.S. (Ocean Engineering), Virginia Polytechnic Institute and State University, 1989
- Ph.D., Mechanical Engineering, The Johns Hopkins University, 1995
Bio
Cameron Riviere received the Ph.D. in mechanical engineering from The Johns Hopkins University in 1995, and joined the Robotics Institute at Carnegie Mellon University the same year. He is presently Research Professor of Robotics, Biomedical Engineering, and Mechanical Engineering, and the Director of the Surgical Mechatronics Laboratory in the Robotics Institute. Since 1998 he has also been Adjunct Professor in the Department of Rehabilitation Science and Technology at the University of Pittsburgh. He has been guest editor of special issues on medical robotics in the Proceedings of the IEEE and in the Annals of Biomedical Engineering. His research interests include medical robotics, control systems, signal processing, and biomedical applications of human-machine interfaces.
Research
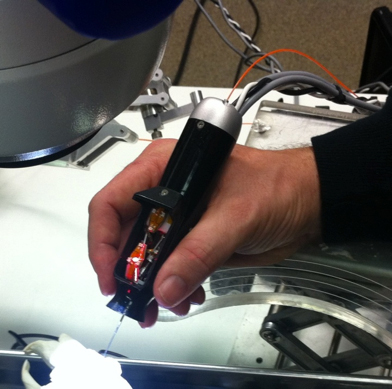
Most of my research is in surgical robotics, especially systems for microsurgery and minimally invasive surgery that enhance surgical performance while also being “minimally obtrusive” in the operating room. Many of my projects deal with compensation of involuntary physiological motion for enhanced accuracy in surgery. One example is “Micron,” an active handheld instrument which estimates the surgeon’s hand tremor and deflects its own tip with an equal but opposite motion to provide smooth control for specialties such as retinal microsurgery. Another example is “HeartLander,” a miniature crawling robot that compensates for heartbeat and respiratory motion by adhering to the surface of the heart using suction and crawls to specified targets for surgery. My research involves modeling and simulation, mechanical design, electrical design, signal processing, control systems, fabrication, and testing. As an outgrowth of the tremor modeling research, I also do research in input filtering for assistive computer interfaces.
Research Interests: medical robotics; rehabilitation robotics; control systems; medical devices; biomedical human-machine interfaces
Awards and Recognition
-
Best Paper of 2016, IEEE/ASME Transactions on Mechatronics
-
Finalist for Best Medical Robotics Paper, IEEE International Conference on Robotics and Automation, 2016
-
Best Paper, IEEE International Conference on Multisensor Fusion and Integration, 2015
-
Best Application Paper, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014
-
Best Paper, 28th World Congress on Endourology and Shockwave Lithotripsy, 2010
-
Best Surgical Applications e-Poster, Annual Conference of the American Society for Laser Medicine and Surgery, 2010
-
Best Mini Presentation, Annual Scientific Meeting, International Society for Minimally Invasive Cardiothoracic Surgery, 2007