Team Explorer Prepares for Final Round of DARPA SubT Challenge
By Aaron Aupperlee
Media Inquiries- School of Computer Science
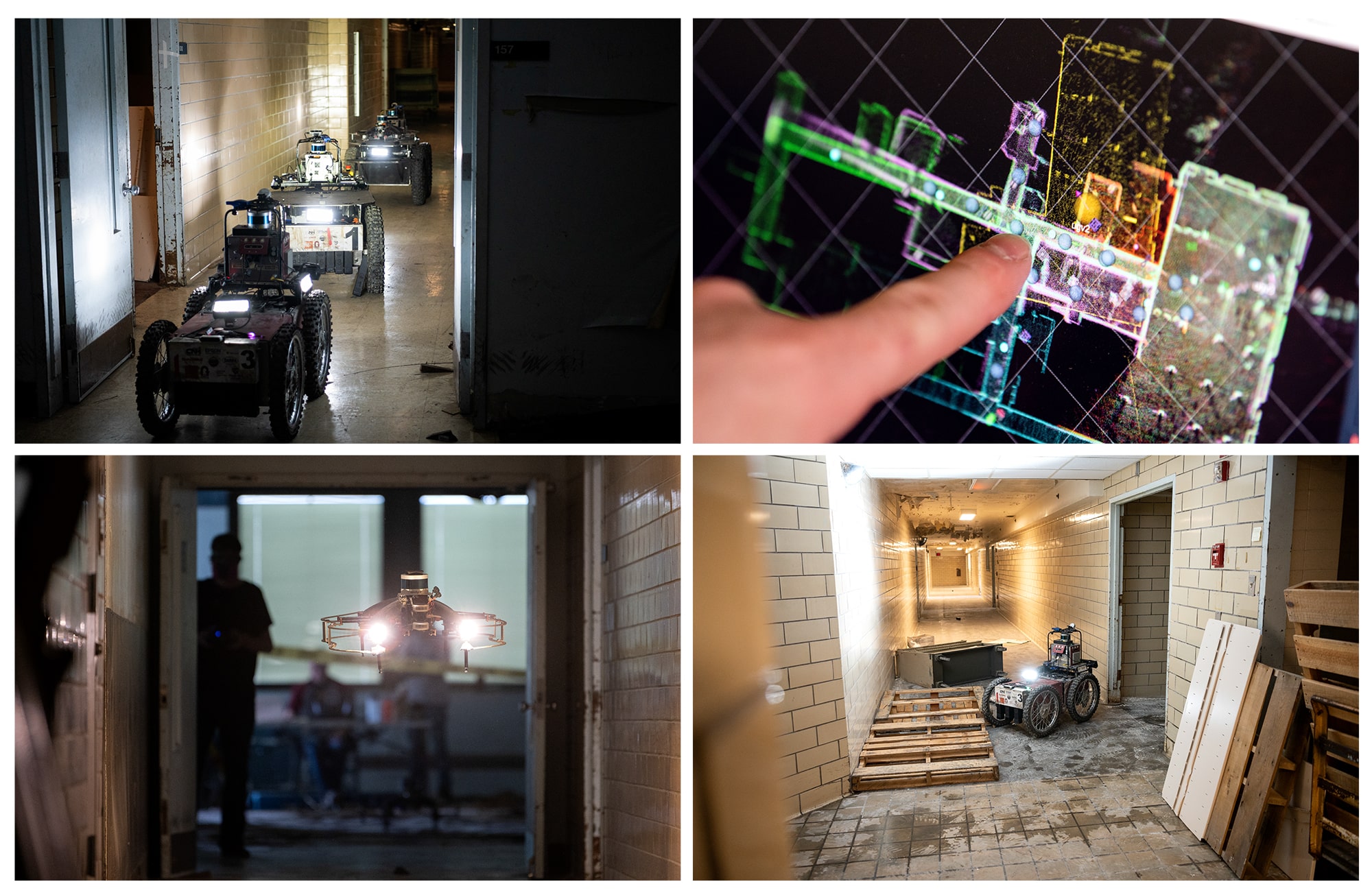
A fleet of robots will venture into the unknown darkness of a cave in Carnegie Mellon University's attempt to win $2 million in the final round of the DARPA Subterranean Challenge.
The robots will roll, fly and walk through tunnels, up and down stairs, and around obstacles in a simulated search-and-rescue mission. Their cameras not only see but also recognize what they are seeing. Their sensors build maps of the uncharted course as the robots explore. And it's all done autonomously.
Team Explorer, the SubT Challenge entry from CMU and Oregon State University, is in the last stage of preparation for the competition this month inside the Mega Caverns cave complex in Louisville, Kentucky. After placing first in Round 1 and second in Round 2, the team aims to repeat as top performers in the finals and take home a share of the $5 million prize money.
"I'm quite proud of what we've achieved technology wise, but the question is: Will it all come together?" said Sebastian Scherer, an associate research professor in the Robotics Institute at CMU's School of Computer Science and a co-leader of Team Explorer. "There are many uncertainties to come, and it will all be up to how we deal with those."
The final competition will occur Sept. 21-24. Eight teams including Team Explorer will compete in the Systems Competition — building robots to search a course in a real cave. Twelve teams will compete in the Virtual Competition, a simulation that tests the teams' ability to develop software and algorithms.
The SubT Challenge started in 2018. The multiyear competition, sponsored by the Defense Advanced Research Projects Agency (DARPA), challenges autonomous robots to map underground environments and look for objects, such as backpacks, emergency equipment, hazards and even simulated human survivors. The challenge aims to develop technologies needed by military and civilian first responders to operate in underground environments that are potentially unsafe for humans.
The robots must navigate obstacles and search autonomously with no input from the team. As robots find objects, they report their locations back to the team, which can then submit it to DARPA. Identifying an object in its correct location scores a point.
"We're doing the fundamental research that makes commercial advancements possible," said Matt Travers, a systems scientist in the RI and a co-lead of the team. "The challenges and obstacles faced during this competition will benefit society not just underground but above ground as well."
Team Explorer decisively won Round 1, the Tunnel Circuit, held in August 2019 in the research mine operated by the National Institute for Occupational Safety and Health in South Park Township, outside of Pittsburgh. It placed second in Round 2, the Urban Circuit, held in February 2020 inside an abandoned, never-commissioned nuclear power plant at Satsop Business Park near Olympia, Washington. The Systems Competition for Round 3, the Cave Circuit, was canceled because of the COVID-19 pandemic; however, the Virtual Competition occurred.
The final round will feature challenges and obstacles from each of the three previous environments: tunnel, urban and cave. The course is kept secret from the teams throughout the competition, and they can only walk the course after the competition. DARPA's teaser video of the final round shows the potential for the course to include a mine, a subway station, stalactites in a cave, ramps, rails and other obstacles. After two preliminary rounds of 30 minutes, teams will have 60 minutes to find as many of the 40 objects as they can in the final round.
"The final round brings it all together," said Steven Willits, the team's lead test engineer. "We will face obstacles we've trained for and ones we haven't, but expecting the unexpected is part of preparation for this event."
 The team has tested its robots locally at caves and buildings, including an abandoned hospital in Pittsburgh, the Tour-Ed Mine in Tarentum and Brady's Bend Underground Storage north of the city. It has fixed bugs in its communication, object detection, autonomy, and simultaneous localization and mapping (SLAM) systems. Challenges such as stairs and dust have forced the team to rethink its approach and design new components.
The team has tested its robots locally at caves and buildings, including an abandoned hospital in Pittsburgh, the Tour-Ed Mine in Tarentum and Brady's Bend Underground Storage north of the city. It has fixed bugs in its communication, object detection, autonomy, and simultaneous localization and mapping (SLAM) systems. Challenges such as stairs and dust have forced the team to rethink its approach and design new components.
Team Explorer plans to use seven or eight robots in the final competition. It will debut a legged robot to handle stairs and new drones specially designed to fly underground and withstand collisions. The drones' propellers are underneath its body and protected with two guards. Software can sense impact and tell the drone how to respond.
Additionally, the team has improved the robots' object detection systems and increased the level of coordination between the robots. Oregon State University — headed by Geoff Hollinger, an associate professor of mechanical engineering at Oregon State and a CMU robotics alumnus — has provided critical software for multirobot coordination and object detection.
"It has been a fantastic experience working with this incredible team," said Hollinger. "I'm excited to see how our contributions to the perception and coordination systems will pay off in the final challenge."
While the results of the competition will be known by the end of the weekend, it could take years — even a decade — to see the real impact of the challenge. DARPA organized autonomous vehicle challenges in the mid-2000s and self-driving cars began testing on city streets 10 years later.
"We've made a lot of progress. We've maybe solved 90% of the challenges facing robotics in autonomous, subterranean environments, but I think we'll spend another decade solving the rest," Scherer said.
Team Explorer is one of four teams in the final competition receiving funding from DARPA to develop hardware and software for the competition. Additional support came from several generous sponsors.