NREC at 25: 25 Technologies That Changed the World
- University Communications & Marketing
- 512-705-1228
- University Communications & Marketing
- 412-627-3786
Experts at Carnegie Mellon's National Robotics Engineering Center have been pushing the field of robotics for more than 25 years.
 NREC partnered with the U.S. Army Corps of Engineers to develop "ARMOR 1," the largest yet of NREC's robots. The robot automates the assembly and placement of large mats along the Mississippi River to prevent erosion and stabilize the vital commercial waterway.
NREC partnered with the U.S. Army Corps of Engineers to develop "ARMOR 1," the largest yet of NREC's robots. The robot automates the assembly and placement of large mats along the Mississippi River to prevent erosion and stabilize the vital commercial waterway.
NREC teamed with Oshkosh Defense to develop autonomous unmanned ground vehicle technologies for tactical logistics wheeled vehicles used by the US Marine Corps.
NREC developed a path planner for the Anti-Submarine Warfare Continuous Trail Autonomous Vessel to help it navigate while obeying international maritime law.
NREC and Sikorsky Aircraft paired an autonomous ground vehicle with an unmanned helicopter to autonomously survey sites for radiation, biological or chemical contamination.
NREC developed the Hybrid Safety System to enable humans and industrial robots to safely work together by locating humans and objects that enter a robot's work area and creating safety zones.
A remotely operated mobile robot, Sensabot performs on-site inspections in hazardous environments such as oil and gas fields. It also can operate in extreme temperatures and toxic atmospheres.
NREC's sensor system included in DARPA's Legged Squad Support System (LS3) enables LS3 to perceive its surroundings, understand the environment, and autonomously track and follow a human leader.
Carnegie Mellon University/NREC and General Motors built an autonomous SUV (named "Boss") that won first place in the 2007 DARPA Urban Challenge, 20 minutes ahead of the 2nd place finisher.
NREC developed the Autonomous Haulage System with Caterpillar to automate large off-highway trucks in mining operations to allow the trucks to work safely with personnel and other mine equipment.
NREC's drug discovery system has screened tens of thousands of compounds so far, with promising new therapies identified for further research and development.
NREC's Advanced Robotic Laser Coating Removal System uses a powerful laser stripping tool and complex robots to automatically remove paint and coatings from U.S. Airforce aircraft.
NREC created reconfigurable wheel-track technology for DARPA’s Ground-X vehicle, featuring wheels that reconfigure to triangular tracks to instantly optimize mobility over different types of terrain.
Profiler was designed to meet all of the challenges of the underground environment, which allows the platform to be sent into areas too dangerous for humans.
The Autonomous Robotic Manipulation Software team was part of a DARPA competition to program an autonomous robotic manipulator to carry out high-level tasks with little supervision.
NREC developed advanced machine vision techniques for safety around agricultural vehicles.
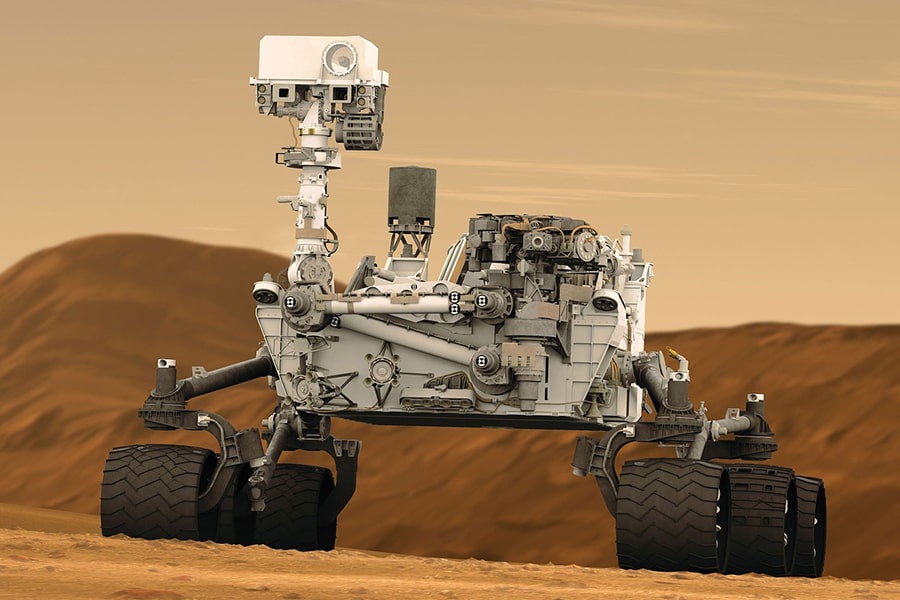
CMU engineers and graduate students provided critical algorithm and software for the autonomous navigation software for the Mars Opportunity and Curiosity rovers.
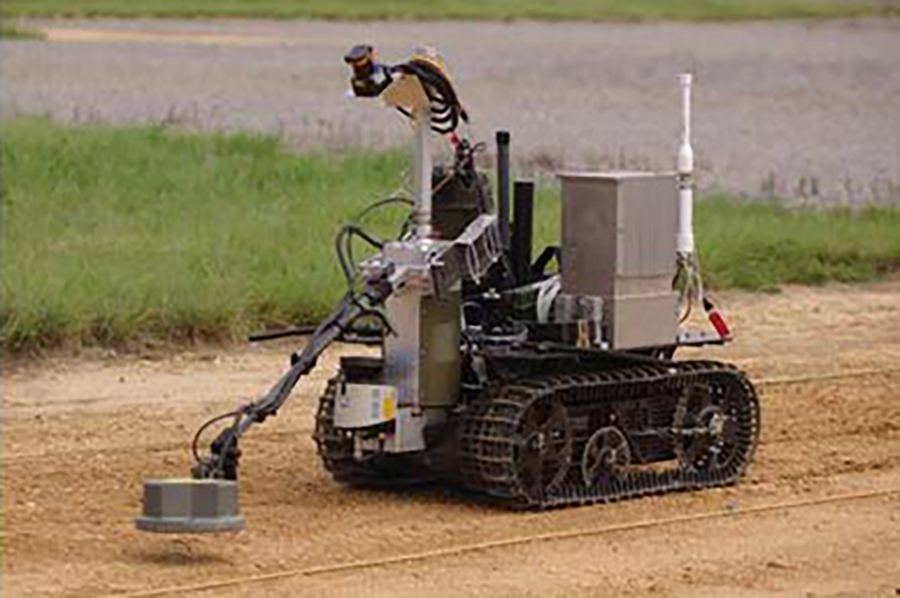 NREC has developed several robots that can detect land mines. Many of these are unmanned and have been deployed in both humanitarian applications and to protect military personnel in combat areas.
NREC has developed several robots that can detect land mines. Many of these are unmanned and have been deployed in both humanitarian applications and to protect military personnel in combat areas.
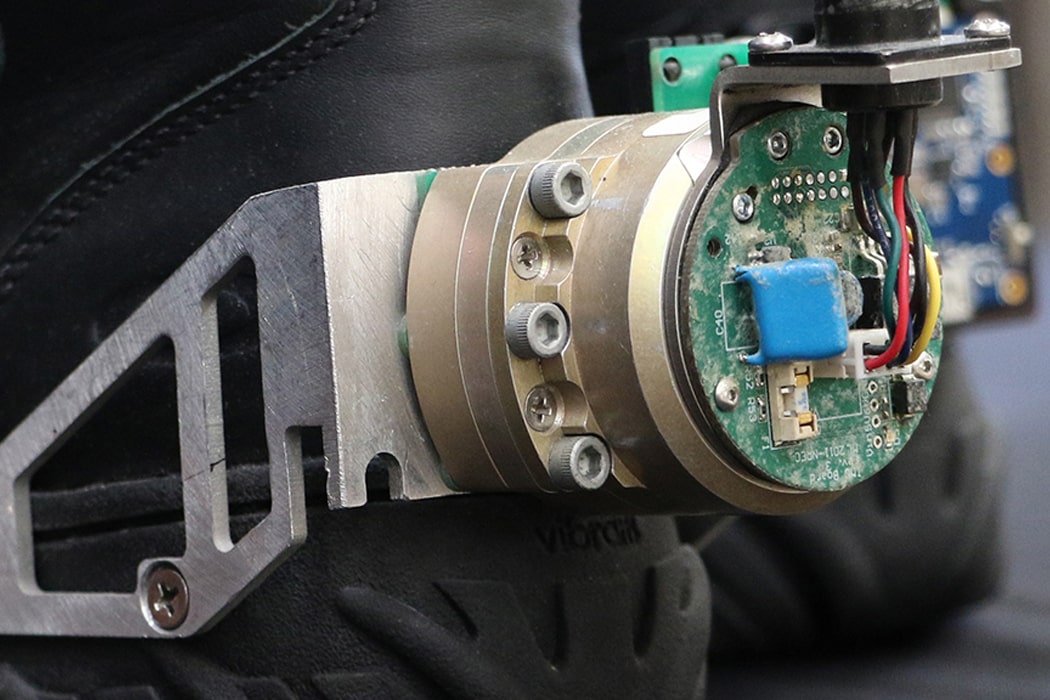 GPS-Free Positioning is a wearable navigation and localization aid developed by NREC to locate a person by keeping track of his or her footsteps in places where GPS isn’t available.
GPS-Free Positioning is a wearable navigation and localization aid developed by NREC to locate a person by keeping track of his or her footsteps in places where GPS isn’t available.
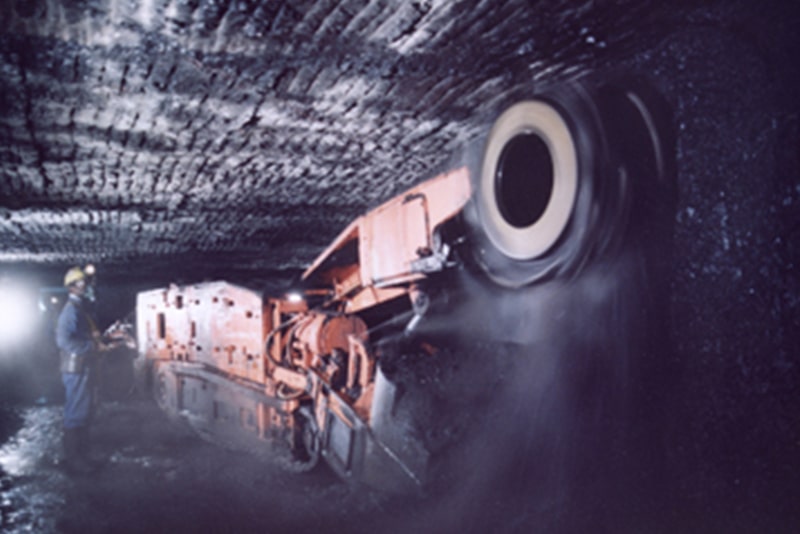 NREC applied robotic sensors on an underground coal miner to accurately measure the machine’s position, orientation and motion thereby assisting operators to more precisely control the machine while decreasing hazards.
NREC applied robotic sensors on an underground coal miner to accurately measure the machine’s position, orientation and motion thereby assisting operators to more precisely control the machine while decreasing hazards.
 NREC designed, built and deployed Pipeline Explorer, the first untethered, remotely controlled robot for long-range and extended duration inspections of live underground natural gas distribution pipelines.
NREC designed, built and deployed Pipeline Explorer, the first untethered, remotely controlled robot for long-range and extended duration inspections of live underground natural gas distribution pipelines.
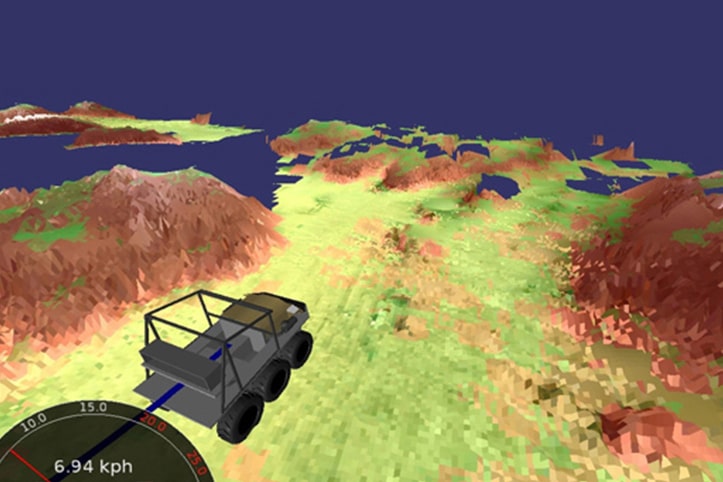 NREC developed the Enhanced Teleoperation technology, which is a real-time 3D video system to improve situation awareness in teleoperation and indirect driving of unmanned ground vehicles in complex environments.
NREC developed the Enhanced Teleoperation technology, which is a real-time 3D video system to improve situation awareness in teleoperation and indirect driving of unmanned ground vehicles in complex environments.
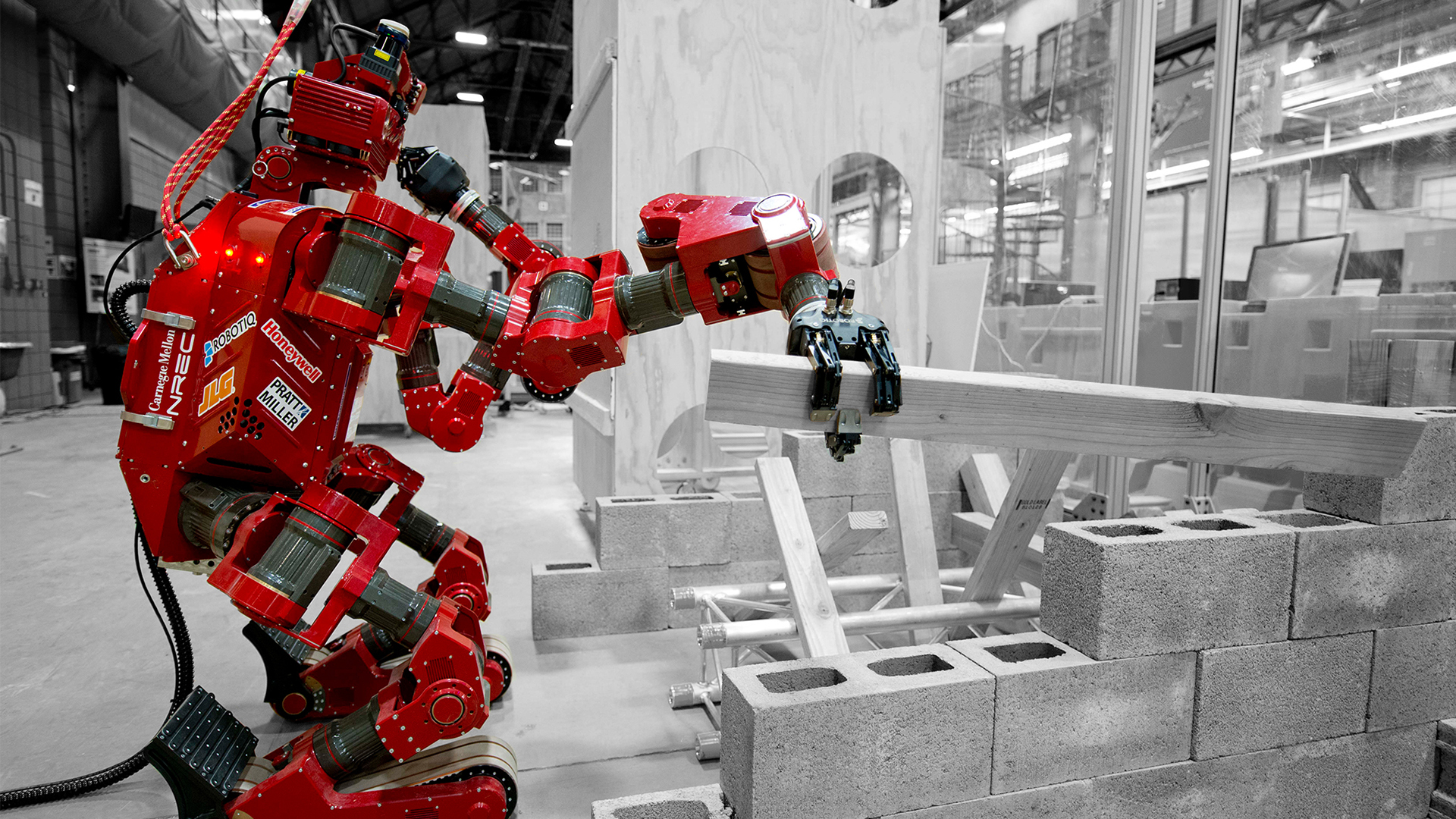
Tartan Rescue Team, also known as CHIMP, was created for the DARPA Robotics Challenge to assist in disasters in response to the Fukushima nuclear accident. CHIMP can open doors, turn valves, connect hoses, use hand tools, drive vehicles, clear debris and climb stairs — all of which require technical advances in perception, supervised autonomy, decision-making, mobility, dexterity, strength and endurance.
 NREC developed off-road autonomy technology used in “Crusher,” to allow the vehicle to move quietly over extreme terrain, to improve safety for U.S. Army troops.
NREC developed off-road autonomy technology used in “Crusher,” to allow the vehicle to move quietly over extreme terrain, to improve safety for U.S. Army troops.

NREC used its expertise in machine vision, mechanisms and manipulation to build an automated strawberry plant sorter that streamlines the harvesting process and ensures consistent plant quality.
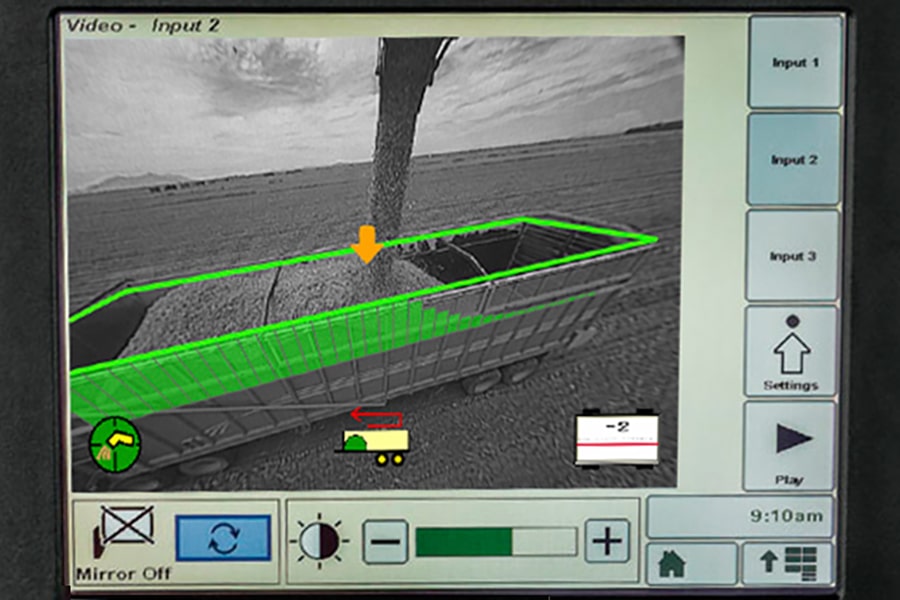
Remote sensing and image processing developed by NREC has been used in combine and forage harvesters to provide consistent grain quality and to more efficiently fill the harvester's trailer.