Carnegie Mellon's Inflatable Robotic Arm Inspires Design of Disney's Latest Character
Fictional Baymax in the Movie "Big Hero 6" Embodies New Research on Soft Robotics
By Byron Spice / 412-268-9068
PITTSBURGH—When Don Hall saw a robot arm made of balloons while visiting Carnegie Mellon University's Robotics Institute several years ago, he knew instantly that Baymax, a pivotal character in the animated feature he was co-directing for Disney, also would be an inflatable robot.
That movie, "Big Hero 6," set to light up movie screens Nov. 7, is an action-packed, comedy-adventure in which Baymax, a gentle robot designed to care for humans, is transformed into a warrior and joins a band of high-tech heroes. As realized by Hall and his team of writers and animators, Baymax is both more huggable and more capable than anything now in Carnegie Mellon's research labs.
But the fictional, balloon-like robot nevertheless reflects a growing field of research at Carnegie Mellon called soft robotics.
 "The movie is a tremendous win for soft robotics," said Chris Atkeson, professor of robotics. He said mobile robots made from soft materials — fabrics, balloons, light plastics — offer advantages over metal robots, including lower weight, lower cost and greater safety when operating near people. Some of these robots will be wearable, others disposable. Yet in the public mind, robots are almost universally metal — whether they are the industrial robots that assemble cars or the robots of popular science fiction, such as Wall-E.
"The movie is a tremendous win for soft robotics," said Chris Atkeson, professor of robotics. He said mobile robots made from soft materials — fabrics, balloons, light plastics — offer advantages over metal robots, including lower weight, lower cost and greater safety when operating near people. Some of these robots will be wearable, others disposable. Yet in the public mind, robots are almost universally metal — whether they are the industrial robots that assemble cars or the robots of popular science fiction, such as Wall-E.
"I think this movie will be inspirational for a lot of people," Atkeson added.
At Carnegie Mellon, researchers are proving that these soft robots can do real work while developing technologies, such as artificial muscles, touch sensors and pressure-sensitive skins, that will make them practical.
Among CMU's soft robotics researchers is Yong-Lae Park, an assistant professor in the Robotics Institute and the founder of the Soft Robotics and Bionics Lab. Park is working with Atkeson to develop a lightweight robotic arm that will use balloons as exterior cushions, while employing pneumatic artificial muscles to actuate the arm. Park also is developing new types of soft, artificial skin sensors and soft artificial muscle actuators for controlling robotic devices, as well as strap-on devices that could be used to compensate for limb disorders or to extend human capabilities.
 Carmel Majidi, an assistant professor in the Department of Mechanical Engineering, meanwhile heads the Soft Machines Lab, where he is working on soft, stretchable elastic films and flexible electronics that, when integrated into soft robots or clothing, could serve as artificial skin. In addition to soft actuators and sensors, his lab is developing new methods for rapidly and affordably making these materials using 3D printing and other advanced fabrication technologies.
Carmel Majidi, an assistant professor in the Department of Mechanical Engineering, meanwhile heads the Soft Machines Lab, where he is working on soft, stretchable elastic films and flexible electronics that, when integrated into soft robots or clothing, could serve as artificial skin. In addition to soft actuators and sensors, his lab is developing new methods for rapidly and affordably making these materials using 3D printing and other advanced fabrication technologies.
"It really became apparent when we saw the soft robotics that that would be our ticket to putting a robot on the screen we had never seen before," Hall said.
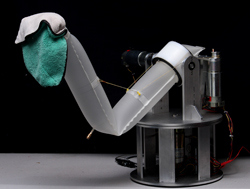
The inflatable robotic arm that proved so inspirational to Hall was developed in Atkeson's lab by Siddharth Sanan during his Ph.D. thesis research.
"We did not invent the idea of an inflatable robot arm," Atkeson said, "What we wanted to know was: how do we make it practical?"
 It was a project within the National Science Foundation-sponsored Quality of Life Technology Center, which adapts robotic technology to meet the needs of the elderly and people with disabilities, so they were particularly curious to learn whether an arm of balloons could do work that required a high degree of safety — giving a patient a sponge bath, for instance, or feeding a patient.
It was a project within the National Science Foundation-sponsored Quality of Life Technology Center, which adapts robotic technology to meet the needs of the elderly and people with disabilities, so they were particularly curious to learn whether an arm of balloons could do work that required a high degree of safety — giving a patient a sponge bath, for instance, or feeding a patient.
Sanan, now a post-doctoral researcher working on soft, wearable robotics at Harvard University, spent years on the project, often studying inflatable pool toys and stand-up dolls for inspiration on how to build components of a functional, inflatable robot using tools such as heat sealers and heat guns.
"Based on the trailers I've seen of Baymax, it looks in a sense similar," Sanan said. "The one missing ingredient in their robot is that you don't see how the system is actuated," he added. "It just moves magically."
Sanan used cables to actuate the limbs of his robot, while designing pneumatically controlled hands. He demonstrated that the inflatable arm could indeed rub a washcloth against his body or maneuver a spoon into his mouth. He and Atkeson subsequently worked with firms such as iRobot and OtherLab that are developing soft robots for the marketplace.
Health care is a natural application for inflatable robots; robots made of soft materials are less likely to cause injury. But Sanan also emphasizes that inflatable robots could be exceptionally portable - something that could be stowed in a backpack, for instance, or launched into space as a small package.
"We also are looking at cheap ways of making robots," Atkeson said. "One way is to steal from the clothing and toy industries, which already know how to make stuff inexpensively."
Fabrics and plastics are inexpensive and cutting them and joining them by melting, gluing and sewing is something accessible to lots of people.
"We're going to make Home Ec hot again," he predicted.
###
Disney's latest animated featured film character, Baymax (top photo), was inspired by an inflatable robotic arm and hand (above photos) developed at CMU in Robotics Professor Chris Atkeson’s lab by Siddharth Sanan during his Ph.D. thesis research.