April 05, 2012
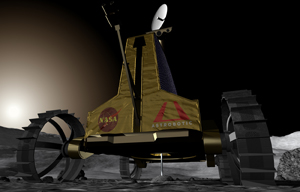 Astrobotic Technology has unveiled a new design and name — Polaris — for its lunar rover, which will prospect for potentially rich deposits of water ice, methane and other resources at the moon's north pole.
Astrobotic Technology has unveiled a new design and name — Polaris — for its lunar rover, which will prospect for potentially rich deposits of water ice, methane and other resources at the moon's north pole.
Astrobotic, a Robotics Institute spin-off founded by Robotics Professor William "Red" Whittaker, is pioneering commercial lunar exploration with expeditions that deliver payloads for space agencies and corporate customers. It also seeks to win the Google Lunar X Prize, which will award more than $20 million to a privately funded team that lands and operates a robot on the moon by December 2015.
The company's plans call for Polaris to be launched atop a Falcon 9 rocket by SpaceX from Cape Canaveral in late October 2015. Four days later, Polaris will land at the lunar north pole during its summer, when patches of ground that are in cold shadow most of the year get brief illumination. This is where ice will be found closest to the surface and when the solar-powered robot will get sufficient sunlight for operations. Polaris will search for ice for the next 12 days until sundown in early November.
The Apollo expeditions only visited six spots along the Moon's equator, so the water, methane, carbon monoxide and other volatiles frozen at the poles went unnoticed for decades. Recent orbiting satellites and a NASA probe that impacted near the south pole showed that polar regions offer resources that could speed human settlement of the solar system. These resources can be turned into rocket propellant to refuel spacecraft for their return trip to Earth. Lunar propellant also can be shipped to Earth orbit to fuel Mars-bound crewed expeditions at less cost than launching propellant from the ground, Astrobotic says.
Polaris carries up to 175 lbs. (80kg) of payload, such as a drill and instruments to analyze samples from the drill. To find the best spot to drill, two sensors will look for signs of hidden ice beneath the surface layer of dry soil. A neutron spectrometer will measure the number of neutrons given off by the first yard of soil beneath the rover; a dip in the reading indicates neutrons coming in from space are being absorbed by hydrogen (in water or methane) in ice beneath the robot. A near infrared spectrometer will look for variations in surface temperature that may hint at ice below.
Polaris is adapted from a lunar excavation machine that Astrobotic has been prototyping under a NASA contract granted in 2010. After Polaris and other prospecting robots find the highest ice concentrations, excavation robots will remove the covering layer of dry soil to recover the ices and deliver them to a plant that turns them into rocket propellant.
The new polar mission supplants Astrobotic's earlier plan to land a robot near an Apollo landing site.
News Brief: Astrobotic Announces New Robot Design, New Lunar Mission
Robotics Institute Spin-off Plans Launch in October 2015
By Byron Spice
Astrobotic Technology has unveiled a new design and name — Polaris — for its lunar rover, which will prospect for potentially rich deposits of water ice, methane and other resources at the moon's north pole.Astrobotic, a Robotics Institute spin-off founded by Robotics Professor William "Red" Whittaker, is pioneering commercial lunar exploration with expeditions that deliver payloads for space agencies and corporate customers. It also seeks to win the Google Lunar X Prize, which will award more than $20 million to a privately funded team that lands and operates a robot on the moon by December 2015.
The company's plans call for Polaris to be launched atop a Falcon 9 rocket by SpaceX from Cape Canaveral in late October 2015. Four days later, Polaris will land at the lunar north pole during its summer, when patches of ground that are in cold shadow most of the year get brief illumination. This is where ice will be found closest to the surface and when the solar-powered robot will get sufficient sunlight for operations. Polaris will search for ice for the next 12 days until sundown in early November.
The Apollo expeditions only visited six spots along the Moon's equator, so the water, methane, carbon monoxide and other volatiles frozen at the poles went unnoticed for decades. Recent orbiting satellites and a NASA probe that impacted near the south pole showed that polar regions offer resources that could speed human settlement of the solar system. These resources can be turned into rocket propellant to refuel spacecraft for their return trip to Earth. Lunar propellant also can be shipped to Earth orbit to fuel Mars-bound crewed expeditions at less cost than launching propellant from the ground, Astrobotic says.
Polaris carries up to 175 lbs. (80kg) of payload, such as a drill and instruments to analyze samples from the drill. To find the best spot to drill, two sensors will look for signs of hidden ice beneath the surface layer of dry soil. A neutron spectrometer will measure the number of neutrons given off by the first yard of soil beneath the rover; a dip in the reading indicates neutrons coming in from space are being absorbed by hydrogen (in water or methane) in ice beneath the robot. A near infrared spectrometer will look for variations in surface temperature that may hint at ice below.
Polaris is adapted from a lunar excavation machine that Astrobotic has been prototyping under a NASA contract granted in 2010. After Polaris and other prospecting robots find the highest ice concentrations, excavation robots will remove the covering layer of dry soil to recover the ices and deliver them to a plant that turns them into rocket propellant.
The new polar mission supplants Astrobotic's earlier plan to land a robot near an Apollo landing site.