Robots
Spirit
Spirit is a dynamic quadruped from Ghost Robotics for robust locomotion tasks. Our Spirit (named Charlie) is a testbed for work on multi-level planning, control, and state estimation frameworks. With Charlie, we seek to demonstrate robust execution of agile motion through complex environments and extend the utility of legged robots outside of lab settings.
Minitaur
The Minitaur is a dynamic quadrupedal platform designed by Ghost Robotics for robust locomotion tasks. In the Robomechanics Lab, our Minitaurs (named Odie and Ellie) are testbeds for the synthesis of locomotion, manipulation, vision, and planning. We couple the locomotion capabilities supplied by Ghost Robotics with our own manipulation tasks and self-manipulation features (tails, flywheels, etc) to more effectively interact with the environment, from digging in soil to moving objects to navigating rugged terrain. Through Odie and Ellie, we build design, control, and planning guidelines for intelligent robot-environment interaction to continually push the boundaries of robot performance outside the lab.
Clifford
Clifford is a four wheeled robot built to traverse rough terrain. It has flexible suspension and compliant tires that allow it to maintain traction even on rocky terrain. All four of its wheels can be driven and steered allowing it to perform complex maneuvers. It is outfitted with a range of sensors, such as stereo cameras and LiDAR, that are used for state estimation and terrain mapping. Current research on Clifford focuses on developing terrain aware controllers for autonomous driving on challenging terrain.
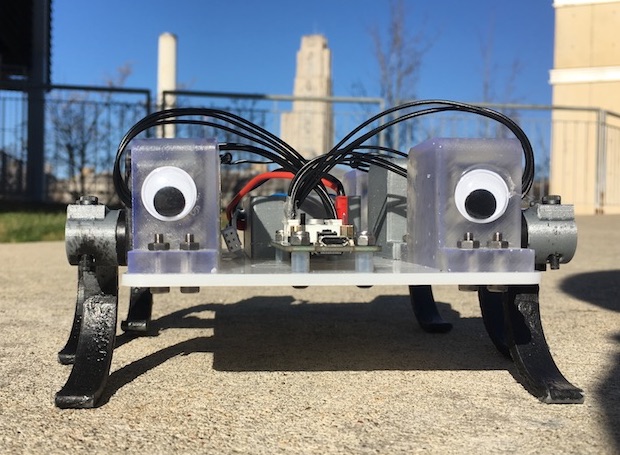
MiniRHex
MiniRHex is a miniature version of a RHex style robot designed to be easy and cost effective to manufacture. MiniRHex can be produced for under $250 using only a lasercutter and a 3D printer. MiniRHex runs on a Robotis mainboard with Dynamixel servos. The code is open source and available on Github. MiniRHex has been used for a wide variety of applications from gait optimization with motion capture feedback to high school level outreach events. Learn more about MiniRHex and build your own here!
Retired Robots
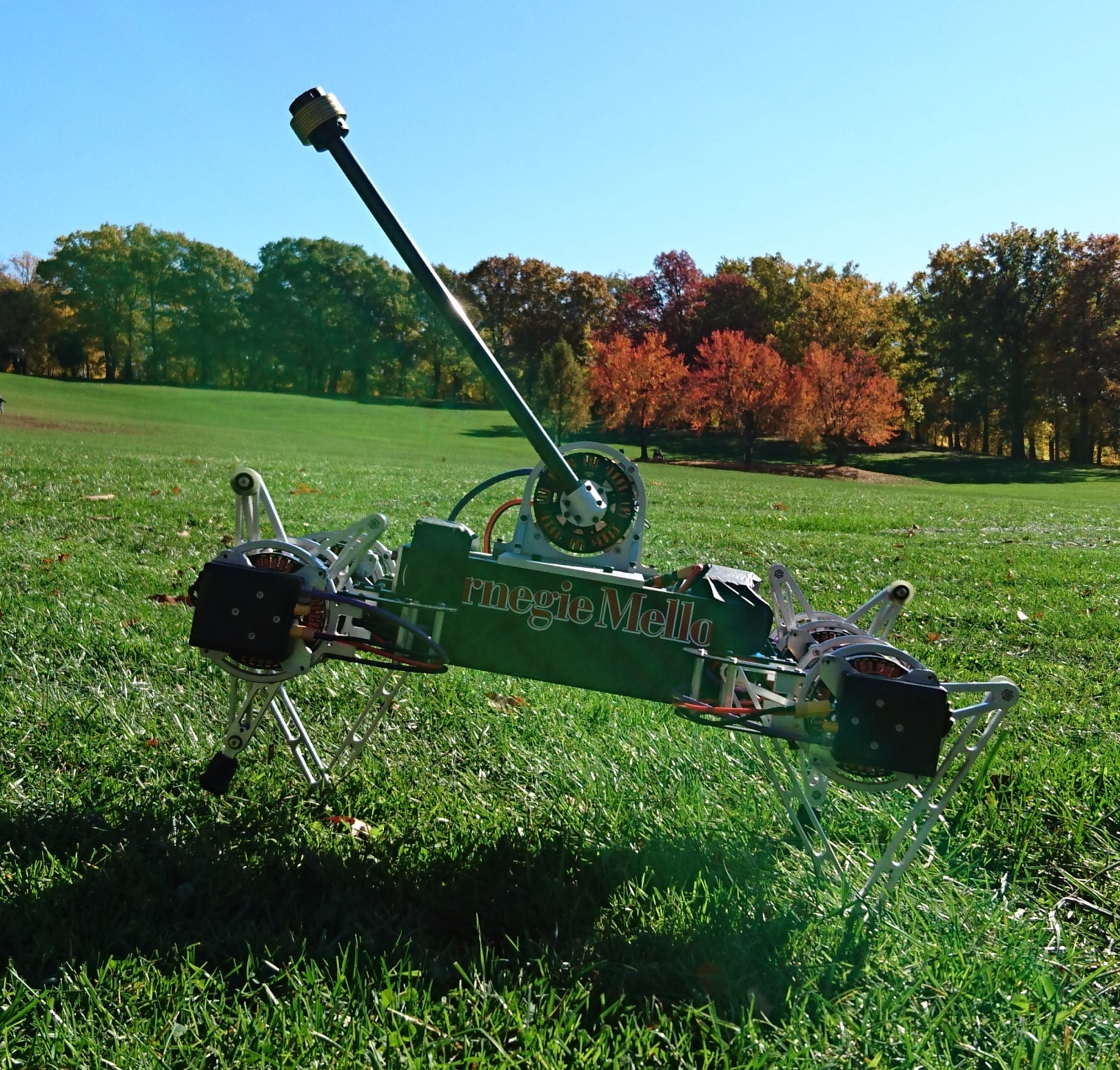
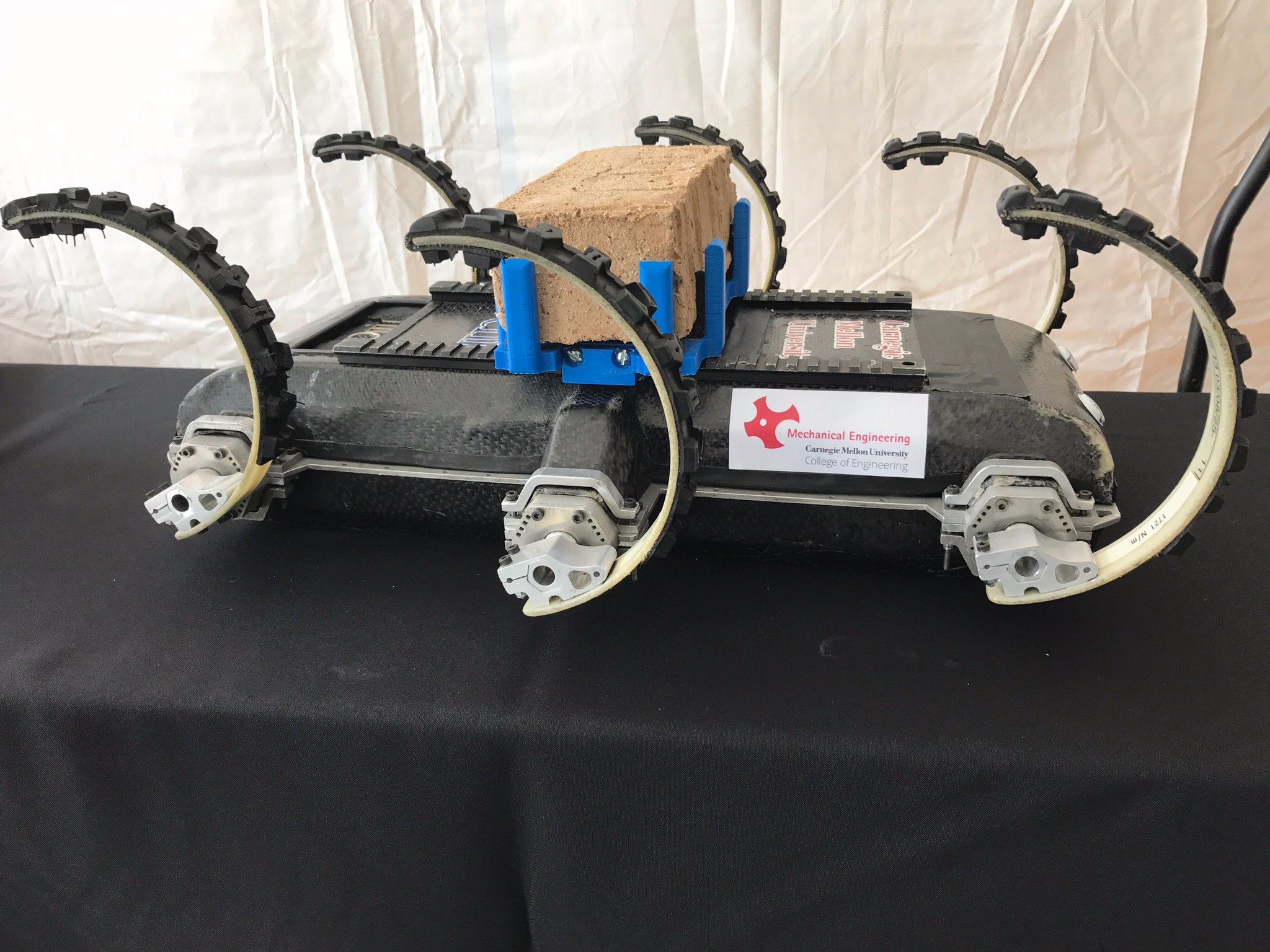
RHex
RHex is a six legged robot inspired by the way cockroaches move through the environment. Each leg has only a single motor and a passively compliant shape, which when used in the right way enable stable, high-speed running and dynamic leaps and jumps. While the original RHex was built in 1999, the robot has gone through many iterations and improvements and still proves to be a capable mobile robot. Our RHex, called X-RHex Lite or XRL, has high torque brushless DC motors, lithium-polymer batteries, a full computer running Ubuntu, and can support a wide variety of payloads like cameras, GPS, or a tail. RHex was used to explore the connection between dynamic locomotion and perception.