Research
A full publication list, sortable by topic area, is available here.
Legged Controls
The Legged Controls Group
focuses on unlocking the potential of legged platforms to navigate unstructured environments. We promote
agile and robust locomotion through computationally efficient algorithms that allow the robot to quickly
reason about its abilities and surroundings. We focus on all aspects of this challenge, from high-level
planning to low-level control, perception and mapping to state estimation and learning. Some of our
recent works include:
fast global motion planning,
MPC for legs and
tails,
and trajectory optimization.
Hybrid System Modeling, Estimation, and Control
This project seeks to further
our understanding of how states evolve in hybrid systems to improve state estimation and control
algorithms. Much of the recent work in this direction has focused on the use of saltation matrices,
which describe the instantaneous uncertainty updates which occur during hybrid events such as leg
touchdown. Some of the associated publications for this research direction include:
Kalman
filtering,
contact localization,
iLQR, and
hybrid event shaping.
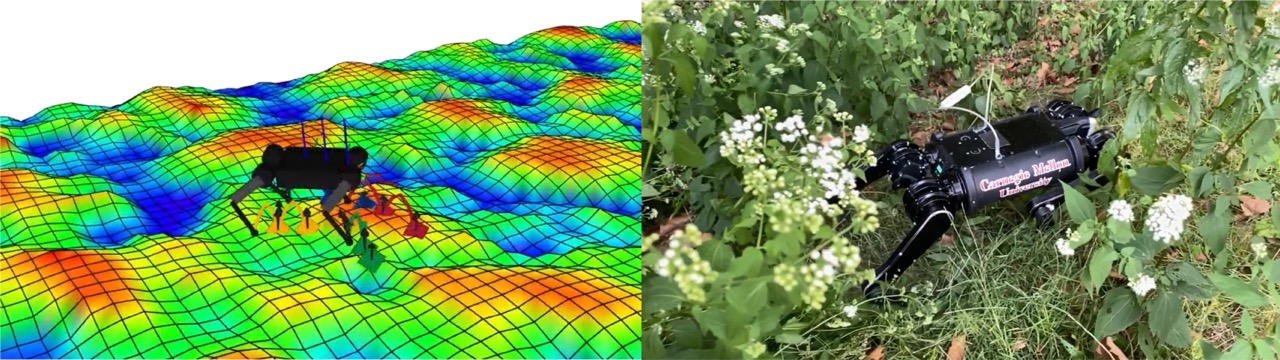
Learning to Drive Off-Road
Many real world tasks require
robots to navigate through unstructured outdoor environments. These environments often include rough
terrain with unavoidable obstacles, such as rocks, and unknown physical properties, such as contact
friction. Autonomous navigation through such environments is difficult as the robot experiences complex,
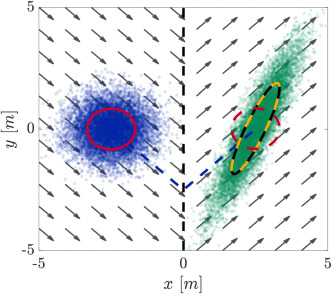
non-static, and divergent robot dynamics. We aim to enable off-road driving by having the robot learn from previous driving experience in
real world and simulated environments to gain a probabilistic understanding of its dynamics in new
environments. Given this probabilistic understanding, the robot can then perform robust decision making to find safe
routes over difficult terrain to its destination.
Terramechanics and Environmental Monitoring
We want robots that can not just move over terrain but actually interact with the environment to enable
planetary exploration and environmental monitoring applications. To achieve this, we work to develop new
physical models of how the robot interacts with terrain features like soil and underbrush, new behaviors
that leverage these robot-terrain interactions, and full systems that can go out and robustly work in
natural environments. For example, nonprehensile
terrain manipulation seeks to leverage incidental robot-terrain interactions for intentional
manipulation of the environment, such as digging trenches with a rover's wheel.
Robotic Climbing
Climbing robots can operate in steep and unstructured environments that other ground robots cannot
access. Robots like LORIS and T-RHex use compliant arrays of small hooks called
microspines to scale rocky surfaces, enabling scientific exploration of cliff faces and subterranean
caves. Similarly, magnetic adhesion enables wall-climbing robots like Sally to automate the inspection
of steel structures such as bridges and storage tanks. The development of these robots involves aspects
ranging from mechanism design and system integration to low-level force control and high-level path
planning.