System Helps Novices Design 3-D-Printable Robotic Creatures
Disney, CMU Develop Tool That Ensures Legged Robots Move as Intended
By Byron Spice / Carnegie Mellon / 412-268-9068 / bspice@cs.cmu.eduand Jennifer Liu / Walt Disney Imagineering / 818-544-6130 / Jennifer.C.Liu@disney.com
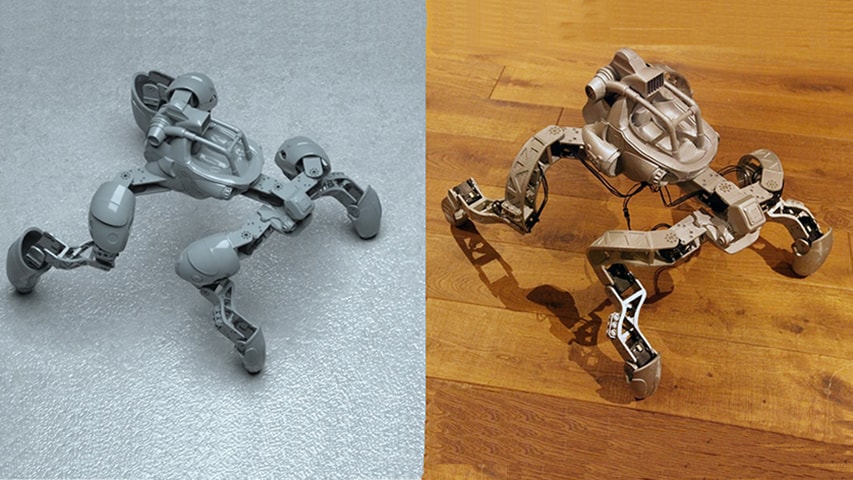
Digital designs for robotic creatures are shown on the left and the physical prototypes produced via 3-D printing are on the right.
Even a novice can design and build a customized walking robot using a 3-D printer and off-the-shelf servo motors with the help of a new design tool developed by Disney Research and Carnegie Mellon University.
The user can specify the shape, size and number of legs for the robotic creature, using intuitive editing tools to interactively explore design alternatives. The system also ensures that the resulting design is capable of moving as desired and not falling down; it even enables the user to alter the creature’s gait as desired.
“Progress in rapid manufacturing technology is making it easier and easier to build customized robots, but designing a functioning robot remains a difficult challenge that requires an experienced engineer,” said Markus Gross, vice president of research for Disney Research. “Our new design system can bridge this gap and should be of great interest to technology enthusiasts and the maker community at large.”
“We aim to reinvent the way in which personal robotic devices are designed, fabricated, and customized according to the individual needs and preferences of their users,” said Stelian Coros, a former Disney research scientist who is now an assistant professor of robotics at Carnegie Mellon.
The research team presented the system at SIGGRAPH Asia 2015, the ACM Conference on Computer Graphics and Interactive Techniques, in Kobe, Japan.
“We aim to reinvent the way in which personal robotic devices are designed, fabricated, and customized according to the individual needs and preferences of their users.” — Stelian Coros
“Our ambition is to make the design of compelling robotic creatures as accessible and intuitive as possible,” said Bernhard Thomaszewski, a research scientist at Disney Research. “Our tool allows the user to design the structure and motion of a robot while receiving immediate feedback on its expected real-world behavior.”
The design interface features two viewports: one that enables editing of the robot’s structure and motion and a second that displays how those changes would likely alter the robot’s behavior.
The user can load an initial, skeletal description of the robot and the system creates an initial geometry and places a motor at each joint position. The user can then edit the robot’s structure, adding or removing motors, or adjusting their position and orientation.
The system takes over much of the non-intuitive and tedious task of planning the motion of the robot. The user nonetheless is able to adjust the robot’s footfall pattern and stylistic elements of its motion.
The researchers have developed an efficient optimization method that uses an approximate dynamics model to generate stable walking motions for robots with varying numbers of legs. In contrast to conventional methods that can require several minutes of computation time to generate motions, the process takes just a few seconds, enhancing the interactive nature of the design tool.
Once the design process is complete, the system automatically generates 3-D geometry for all body parts, including connectors for the motors, which can then be sent to a 3-D printer for fabrication.
The researchers designed and built two four-legged robots using the design system and found that the overall motions of the prototypes were consistent with the behaviors predicted by their simulation.
“It took us minutes to design these creatures, but hours to assemble them and days to produce parts on 3-D printers,” Thomaszewski said. “The fact is that it is both expensive and time-consuming to build a prototype – which underscores the importance of a design system such as ours, which produces a final design without the need for building multiple physical iterations.”
In addition to Gross, Thomaszewski and Coros, the research team included Vittorio Megaro and Otmar Hilliges of ETH Zurich and Maurizio Nitti of Disney Research.
Watch the video.