Carnegie Mellon's Six-legged "Snake Monster" Is First of New Breed of Reconfigurable Modular Robots
Innovative Software, Interfaces and Actuators Make It Easy to Customize Robots
By Byron Spice / 412-268-9068
Carnegie Mellon University's latest robot is called Snake Monster, however, with six legs, it looks more like an insect than a snake. But it really doesn't matter what you call it, says its inventor, Howie Choset — the whole point of the project is to make modular robots that can easily be reconfigured to meet a user's needs.
Choset, a professor in CMU's Robotics Institute, said the walking robot, developed in just six months, is only one example of the robots that eventually can be built using this modular system. His team already is working on modules such as force-sensing feet, wheels and tank-like treads that will enable the assembly of totally different robots.
"By creating a system that can be readily reconfigured and that also is easy to program, we believe we can build robots that are not only robust and flexible, but also inexpensive," Choset said. "Modularity has the potential to rapidly accelerate the development of traditional industrial robots, as well as all kinds of new robots."
 The Defense Advanced Research Projects Agency sponsored this work through its Maximum Mobility and Manipulation (M3) program, which focuses on ways to design and build robots more rapidly and enhance their ability to manipulate objects and move in natural environments. Snake Monster, as well as some of Choset's other robots, will be demonstrated at the finals of the DARPA Robotics Challenge, June 5-6 in Pomona, Calif.
The Defense Advanced Research Projects Agency sponsored this work through its Maximum Mobility and Manipulation (M3) program, which focuses on ways to design and build robots more rapidly and enhance their ability to manipulate objects and move in natural environments. Snake Monster, as well as some of Choset's other robots, will be demonstrated at the finals of the DARPA Robotics Challenge, June 5-6 in Pomona, Calif.
For years, Choset's lab has concentrated on building and operating snake-like robots — chains of repeated component joints. By careful coordination of these joints, the robots can be made to move in ways that are similar to a snake's natural undulations and in other ways not seen in nature, such as rolling. Applications for these robots include urban search and rescue, archaeological exploration and, thanks to the robots' ability to move through pipes, inspection of power plants, refineries and sewers.
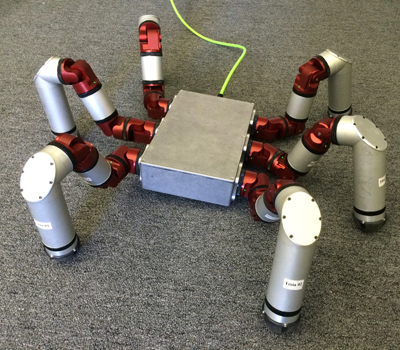
The name Snake Monster harkens to those research origins and the similarity between the snake robots and the legs of the Snake Monster. The six legs have a reach of 12 inches (30 cm), and are connected to a rectangular body, with the whole robot weighing 18 pounds (8 kg). The robot moves with an alternating tripod gait, with three legs in the air at all times — two on one side and one on the other. A YouTube video of the walking robot is available.
To build it, Choset's team used the hardware expertise developed in snake robots to build small, powerful modules and used the lessons learned in controlling the snakebots to create a system architecture that can be easily programmed to control robots with a wide variety of configurations.
"The architecture is built on Ethernet computer networking technology," Choset said. "Ethernet doesn't require that the computers connected to it be of a specific type, but that they all communicate with each other in the same way." The interfaces used in the modular architecture allow robot designers to focus on specific capabilities without having to worry about detailed systems issues or having to modify the robot later, he added.
Also key to the modular approach was the team's development of a series elastic actuator — a motor that has a spring in series with its output shaft. The spring helps protect the motor from high impacts but, more importantly, allows the actuator to measure and regulate the force it exerts, as well as the forces exerted on it.
"When we push the Snake Monster forward, the joints in the leg 'feel' the force of the robot being pushed and, then, in an effort to zero-out the force it feels, the robot walks in the direction it is being pushed," said Choset, who noted the force feedback allows very simple controls to adapt to a wide range of terrains. "When the robot goes over bumpy terrain, the springs in the series elastic actuators allow us to not perfectly plan the foot steps, but rather let the robot automatically conform to the environment the way animals do."
The Robotics Institute is part of Carnegie Mellon's top-ranked School of Computer Science. Follow the school on Twitter @SCSatCMU.
###
Robot inventor Howie Choset says the walking robot (pictured above) is only one example of how robots built using the modular system can easily be reconfigured to meet a user's needs.