Carnegie Mellon Unveils Lunar Rover "Andy"
Four-Wheeled Robot Is Engineered for Exploring Moon's Pits, Caves, Poles
By Byron Spice / 412-268-9068
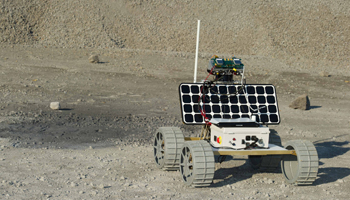 PITTSBURGH—Carnegie Mellon University today unveiled Andy, a four-wheeled robot designed to scramble up steep slopes and survive the temperature swings and high radiation encountered while exploring the moon's pits, caves and polar ice.
PITTSBURGH—Carnegie Mellon University today unveiled Andy, a four-wheeled robot designed to scramble up steep slopes and survive the temperature swings and high radiation encountered while exploring the moon's pits, caves and polar ice.
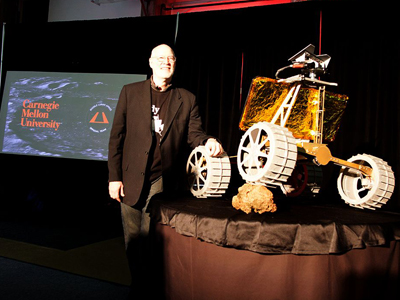
"Every extraterrestrial robot carries some DNA from Carnegie Mellon, but Andy would be the first true CMU robot to make the leap from Earth," said William "Red" Whittaker, professor of robotics and director of the Field Robotics Center. "This is the culmination of lots of work by lots of people and is the next step toward Carnegie Mellon becoming a spacefaring university."
Andy, which derives its moniker from university namesakes Andrew Carnegie and Andrew Mellon, was developed over the last nine months by a largely student workforce and drew on expertise and resources from across the university, including the School of Computer Science, the College of Engineering, the College of Fine Arts and the Mellon College of Science.
The robot is Carnegie Mellon's contribution to an effort led by Pittsburgh's Astrobotic Technology to land a robot on the moon and win the $20 million-plus Google Lunar XPrize. It also represents a larger ambition.
"We don't do anything just to win a prize," Whittaker said. "If we're on the moon anyway, we're going to do something while we're up there."
 One possibility is to use Andy to explore lunar pits. These are giant, newly discovered, steep-sided holes created by the collapse of underground voids.
One possibility is to use Andy to explore lunar pits. These are giant, newly discovered, steep-sided holes created by the collapse of underground voids.
"These pits are astounding and unexplored; it will be like coming upon the Grand Canyon," Whittaker said. "Some pits might be entrances to caves. You can't explore caves from a satellite; you've got to be there, on the ground, so robots are the next big step."
Andy's wide stance, low center-of-gravity and high belly clearance combine for unprecedented stability, slope-climbing and straddling of rocks. Whittaker noted that Andy achieves its superb mobility with very wide wheels and light weight. Andy's wheels are a foot in diameter, which is exceptional for a three-foot rover. Its weight on the moon will be less than 10 pounds.
Jon Anderson, a master's degree student in robotics, led the mobility team. The team's innovations gave Andy the softest footprint and greatest strength-to-weight ratio of any space rover to date. The rover has strong pulling power and a novel suspension for transferring that power to the ground.
Extraterrestrial robots encounter radiation levels that can burn ordinary electronics. Before flight, some of Andy's electronics will be further upgraded with space-certified parts, but the Andy team has already achieved notable reliability and space tolerance using high-reliability terrestrial parts, multiples of some critical components, and innovative software for detecting faults and switching between components as necessary.
Joe Bartels, a Ph.D. student in robotics, explained that a spare component can take over operations permanently if its twin is fatally damaged, or temporarily if its twin can be recovered by rebooting following a failure.
Curtis Boirum, a master's degree student in robotics, said Andy also incorporates a new method for combining landing imagery with 3-D path reconstruction data to plan and document its exploration route.
About 50 students, faculty and staff members contributed long hours to Andy's development, with key team members including: Nate Otten and Heather Jones, both Ph.D. students in robotics; Luke Metro, a sophomore electrical and computer engineering major; John Mann, a junior computer science major; and Jay Jasper, a master's degree student in mechanical engineering.
In addition to scientific exploration, Andy will accommodate a number of artistic payloads coordinated by Lowry Burgess, professor of art, and Mark Baskinger, associate professor of design. More information about Andy and Carnegie Mellon's Lunar Exploration Initiative is available online at http://www.cmu.edu/google-lunar-x/.
Carnegie Mellon's Robotics Institute has led the development of a number of planetary robotic technologies for NASA, including walking robots for exploring active volcanoes, robots designed for extraterrestrial drilling and advanced wheel development. Autonomous driving software originated at Carnegie Mellon is the basis of navigation and safeguarding for NASA's Mars rovers.
###
Andy is a four-wheeled robot designed to scramble up steep slopes and survive the temperature swings and high radiation encountered while exploring the moon's pits, caves and polar ice. The robot is Carnegie Mellon's contribution to an effort led by Pittsburgh's Astrobotic Technology to land a robot on the moon and win the $20 million-plus Google Lunar XPrize.
Pictured above with Andy is William "Red" Whittaker, professor of robotics and director of the Field Robotics Center.