News Brief: CMU Software Helps Guide Curiosity Rover on Mars
By Byron Spice
 Now that NASA has successfully landed its Curiosity rover on Mars, a version of Carnegie Mellon University navigation software will help guide the robot during its mission to determine if Mars ever could have supported life. The software is a version of Field D*, which was first developed at the Robotics Institute in 2000 by Tony Stentz, now director of the National Robotics Engineering Center.
Now that NASA has successfully landed its Curiosity rover on Mars, a version of Carnegie Mellon University navigation software will help guide the robot during its mission to determine if Mars ever could have supported life. The software is a version of Field D*, which was first developed at the Robotics Institute in 2000 by Tony Stentz, now director of the National Robotics Engineering Center.
Field D* builds maps of the terrain a robot encounters so the rover can retrace its steps or plot a new course, if necessary. A version of the software was uploaded to NASA's two Mars exploration rovers, Spirit and Opportunity, in late 2006 to upgrade their autonomous navigation capabilities. The Jet Propulsion Lab, which employs a number of Robotics Institute alumni, has licensed the software from CMU and further adapted it for use by Curiosity.
The Field Robotics Center earlier this year also performed traction studies to help JPL estimate Curiosity's slope-climbing ability, said David Wettergreen, research professor in the Robotics Institute.
###
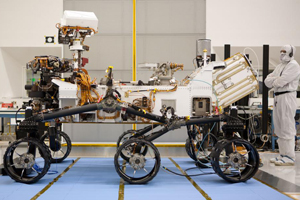
About the size of a small SUV, NASA's Curiosity rover is well equipped for a tour of Gale Crater on Mars. This impressive rover has six-wheel drive and the ability to turn in place a full 360 degrees, as well as the agility to climb steep hills. During a nearly two-year prime mission after landing on Mars, the rover will investigate whether Gale Crater ever offered conditions favorable for microbial life, including the chemical ingredients for life. Image credit: NASA/JPL-Caltech