Autonomous Material Transport
NREC developed the Autonomous Material Transport System (AMTS), an innovative system for accurately guiding robotic material transport vehicles in industrial settings. AMTS uses robotic lift trucks to automate the transfer of pallets and other materials from semi-trailers onto robotic tugs for transport in factories and warehouses. AMTS’s lower-cost, infrastructure-free automation system decreases human involvement in setting up and operating material transport systems. It makes automated loading and unloading of over-the-road trailers more feasible and cost-effective.
Application
The transport of palletized material is prevalent in many industries, especially manufacturing. Different utility vehicles are manually operated to load and unload trucks, move pallets across the factory, stack them, etc.
To automate this process, NREC scientists and engineers developed novel vision systems and associated visual servo control systems, as well as factory-level vehicle traffic coordination software. AMTS is capable of navigating inside a factory without added infrastructure. Additionally, the real-time scheduling system is able to maximize the usage of the different vehicles and minimize the number of 'empty' miles.
Capabilities
NREC scientists and engineers devised a computer vision system that works effectively around the clock, with lights out in many cases and with less damage to vehicles than humans cause. There is typically no need to retrofit the facility infrastructure to accommodate the AGVs.
These AMTS-equipped automated vehicles — robotic forklifts and tugs — find their way around by virtue of a low-cost, high-speed positioning system developed at NREC.
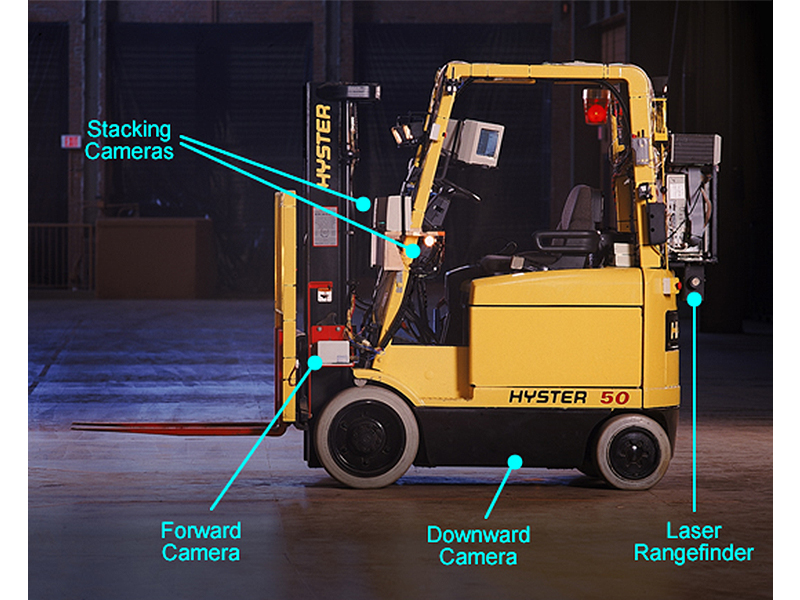
The sensor sysem includes a combination of cameras and laser rangefinders for navigation and control. With a downward-looking camera mounted to the bottom of the forklift, the robot captures visual cues and matches them to a pre-stored database of floor imagery that becomes its map for navigating the floor.
Using a forward-looking camera system, the forklift images the side of the trailer to find pallets for transfer to tug vehicle wagons. The forks are inserted into the pallet holes, and the forklift lifts the pallet. While it is backing out of the trailer, the robotic forklift relies on its laser rangefinder to safety remove the tight-fitting pallet from the trailer. The robotic tug vehicle uses the same downward vision technology to move around and position its wagons for loading and unloading.
Photos