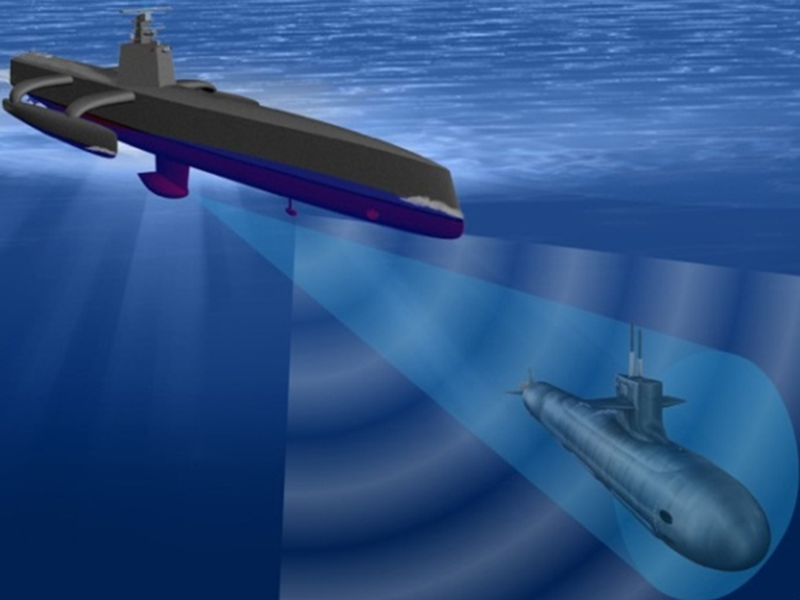
Path Planning for Autonomous Vessel
NREC developed a path planner for the Anti-Submarine Warfare Continuous Trail Autonomous Vessel (ACTUV). A path planning system is a key component of the vessel’s autonomy system, as it helps the vessel autonomously navigate while obeying international maritime law. ACTUV can operate autonomously for long periods of time with minimal supervision from shore. It avoids navigation hazards and follows the International Regulations for Preventing Collisions at Sea (COLREGS), which define the “rules of the road” for ships and other ocean-going vessels.
Application
Autonomous navigation at sea is similar in many ways to autonomous navigation on land. Autonomous surface vessels (ASVs) use their on-board sensors for positioning and perception in much the same way that unmanned ground vehicles (UGVs) do.
ASVs need to obey the laws of the sea, just as UGVs need to obey traffic laws on roads. The International Regulations for Preventing Collisions at Sea (COLREGS) serve as the sea’s traffic laws, specifying how vessels determine right-of-way and much more.
Despite these similarities, autonomous navigation on water has its own challenges. Ships are significantly less maneuverable than land vehicles. Autonomous vessels must consider a much larger area on the water than UGVs do on land, which may require more computational resources. COLREGS are not as well defined as traffic laws. Autonomous vessels also need to behave the same way as manned vessels to avoid confusing other ships.
Capabilities
ACTUV’s autonomy system can handle long transits between distantly-spaced, sparse waypoints. It also supports loitering in an area, maintaining the vessel’s position within a spatially-defined box. Additionally, the autonomy system obeys a set of operational rules that can change based on the vessel’s current situation, its mission, and the discretion of the local captain.
Path Planning Engine
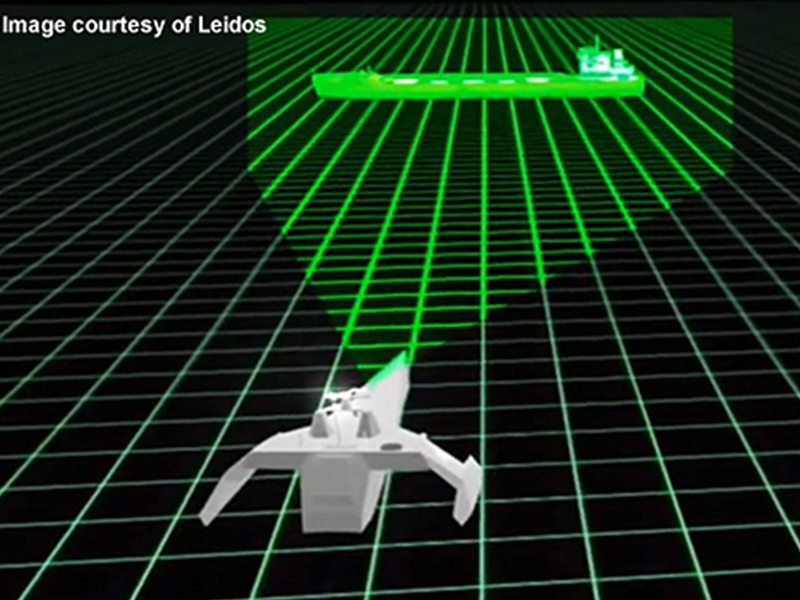
The path planning engine uses the same information that a human ship driver would use to set the vessel’s current speed and heading and plot a safe course. It processes data from the vessel’s sensors (such as radar, lidar, and cameras), navigation hazards from nautical charts, and the vessel’s current position, speed, and heading to build an internal model of its surroundings. The planner also takes ACTUV’s physical capabilities (maximum speed and acceleration, ability to change course, etc.) into account.
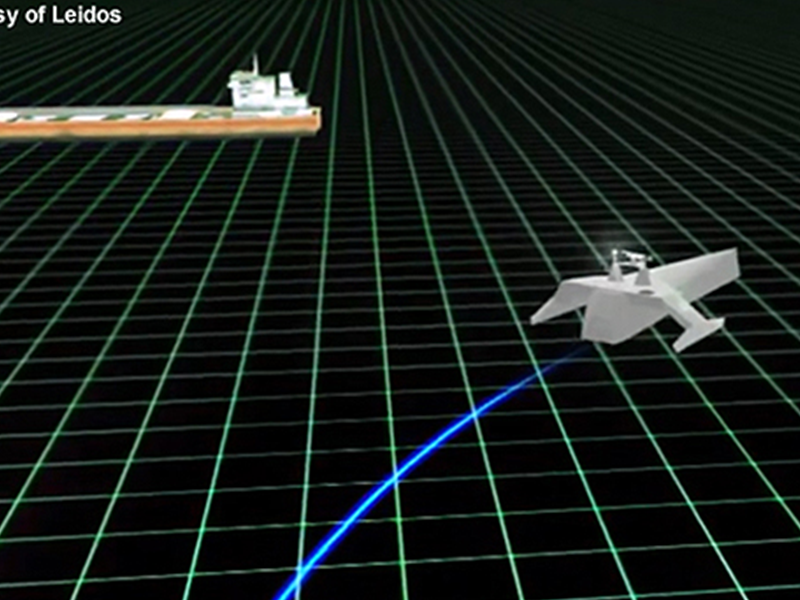
Mission objectives specify coordinates to be visited, the perimeter of an area to patrol, and similar mission-related tasks. The path planning engine uses this information to find the best course to safely reach the vessel’s destination. It interprets the scenario and determines which COLREGS scenario is appropriate, then decides which action to take. All plans must comply with the COLREGS rules.
Photos