Research
The Control & Learning Group conducts research at the intersection of control theory and machine learning, advancing methods for safe decision-making, predictive modeling, and efficient computation in complex and uncertain dynamical systems.
Learning: Kalman Bayesian transformer
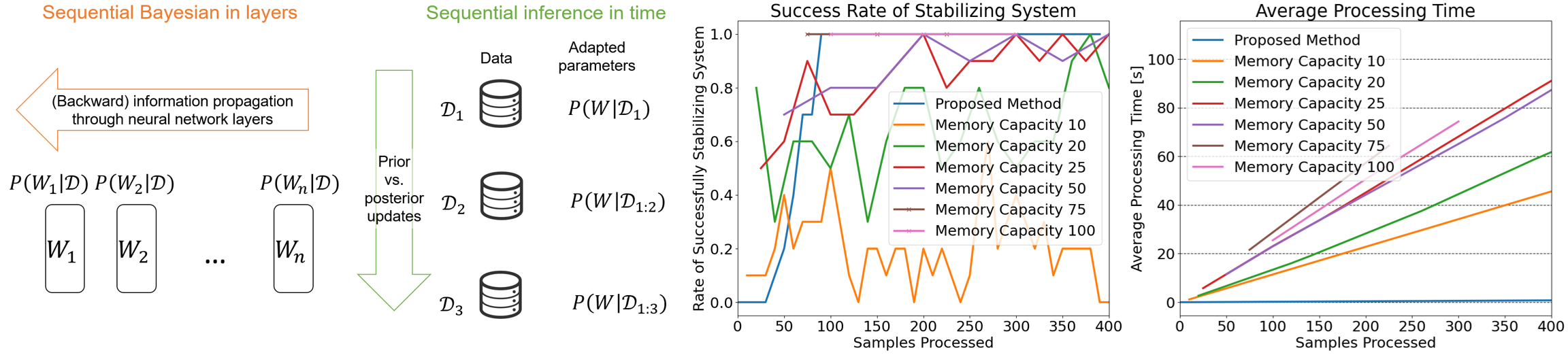 Sequential fine-tuning of transformers is useful when new data arrive sequentially, especially with shifting distributions. Unlike batch learning, sequential learning demands that training be stabilized despite a small amount of data by balancing new information and previously learned knowledge in the pre-trained models. This challenge is further complicated when training is to be completed in latency-critical environments and learning must additionally quantify and be mediated by uncertainty. Motivated by these challenges, we propose a novel method that frames sequential fine-tuning as a posterior inference problem within a Bayesian framework. Our approach integrates closed-form moment propagation of random variables, Kalman Bayesian Neural Networks, and Taylor approximations of the moments of softmax functions. By explicitly accounting for pre-trained models as priors and adaptively balancing them against new information based on quantified uncertainty, our method achieves robust and data-efficient sequential learning. The effectiveness of our method is demonstrated through numerical simulations involving sequential adaptation of a decision transformer to tasks characterized by distribution shifts and limited memory resources.
Sequential fine-tuning of transformers is useful when new data arrive sequentially, especially with shifting distributions. Unlike batch learning, sequential learning demands that training be stabilized despite a small amount of data by balancing new information and previously learned knowledge in the pre-trained models. This challenge is further complicated when training is to be completed in latency-critical environments and learning must additionally quantify and be mediated by uncertainty. Motivated by these challenges, we propose a novel method that frames sequential fine-tuning as a posterior inference problem within a Bayesian framework. Our approach integrates closed-form moment propagation of random variables, Kalman Bayesian Neural Networks, and Taylor approximations of the moments of softmax functions. By explicitly accounting for pre-trained models as priors and adaptively balancing them against new information based on quantified uncertainty, our method achieves robust and data-efficient sequential learning. The effectiveness of our method is demonstrated through numerical simulations involving sequential adaptation of a decision transformer to tasks characterized by distribution shifts and limited memory resources.
Safe control: Safety certificate against latent variables with partially unidentifiable dynamics
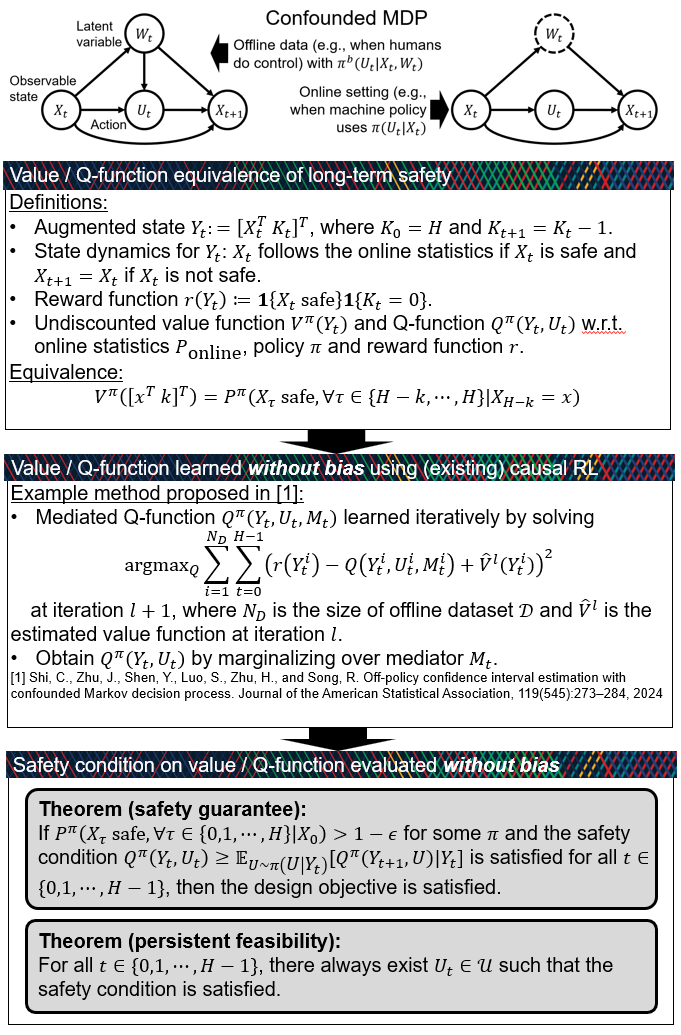 Existing control techniques often assume access to complete dynamics or perfect simulators with fully observable states, which are necessary to verify whether the system remains within a safe set (forward invariance) or safe actions are persistently feasible at all times. However, many systems contain latent variables that make their dynamics partially unidentifiable or cause distribution shifts in the observed statistics between offline and online data, even when the underlying mechanistic dynamics are unchanged. Such “spurious” distribution shifts can break many techniques that use data to learn system models or safety certificates. To address this limitation, we propose a technique for designing probabilistic safety certificates for systems with latent variables. A key technical enabler is the formulation of invariance conditions in probability space, which can be constructed using observed statistics in the presence of distribution shifts due to latent variables. We use this invariance condition to construct a safety certificate that can be implemented efficiently in real-time control. The proposed safety certificate can persistently find feasible actions that control long-term risk to stay within tolerance. Stochastic safe control and (causal) reinforcement learning have been studied in isolation until now. To the best of our knowledge, the proposed work is the first to use causal reinforcement learning to quantify long-term risk for the design of safety certificates. This integration enables safety certificates to efficiently ensure long-term safety in the presence of latent variables. The effectiveness of the proposed safety certificate is demonstrated in numerical simulations.
Existing control techniques often assume access to complete dynamics or perfect simulators with fully observable states, which are necessary to verify whether the system remains within a safe set (forward invariance) or safe actions are persistently feasible at all times. However, many systems contain latent variables that make their dynamics partially unidentifiable or cause distribution shifts in the observed statistics between offline and online data, even when the underlying mechanistic dynamics are unchanged. Such “spurious” distribution shifts can break many techniques that use data to learn system models or safety certificates. To address this limitation, we propose a technique for designing probabilistic safety certificates for systems with latent variables. A key technical enabler is the formulation of invariance conditions in probability space, which can be constructed using observed statistics in the presence of distribution shifts due to latent variables. We use this invariance condition to construct a safety certificate that can be implemented efficiently in real-time control. The proposed safety certificate can persistently find feasible actions that control long-term risk to stay within tolerance. Stochastic safe control and (causal) reinforcement learning have been studied in isolation until now. To the best of our knowledge, the proposed work is the first to use causal reinforcement learning to quantify long-term risk for the design of safety certificates. This integration enables safety certificates to efficiently ensure long-term safety in the presence of latent variables. The effectiveness of the proposed safety certificate is demonstrated in numerical simulations.
Safe control: Online adaptive probabilistic safety certificate with language guidance
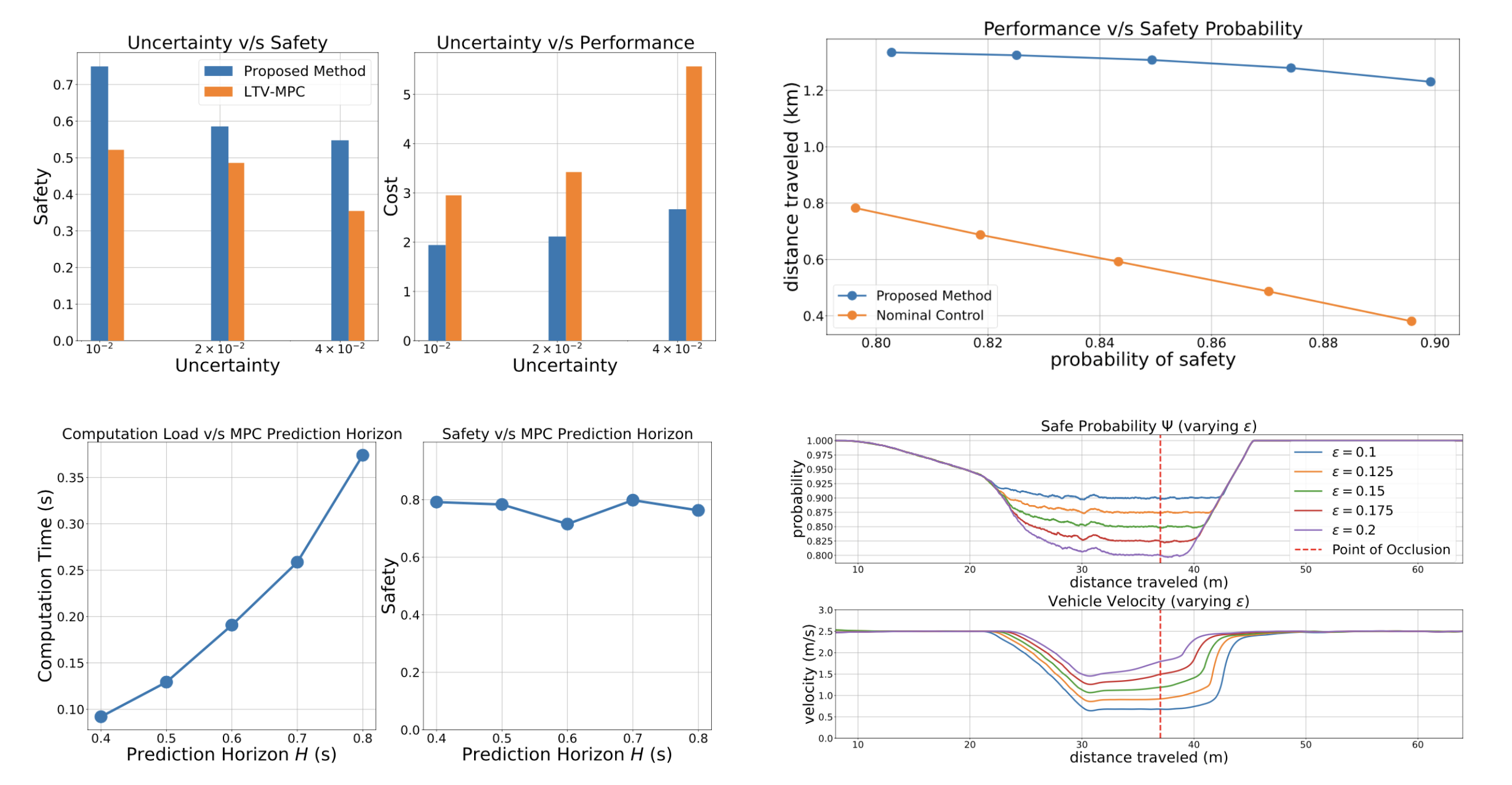
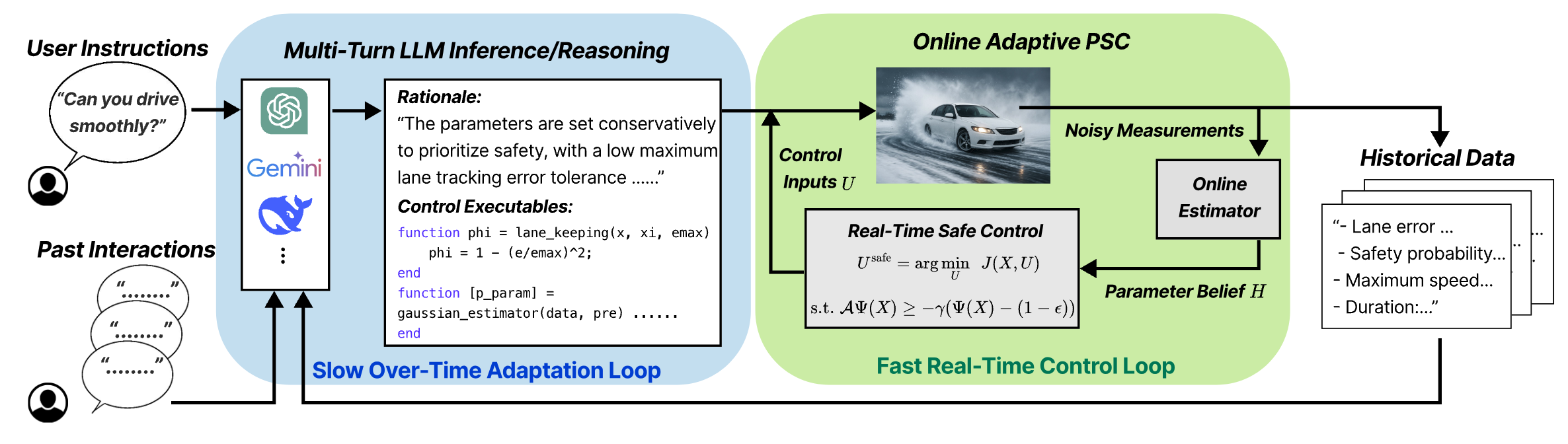 Achieving long-term safety in uncertain/extreme environments while accounting for human preferences remains a fundamental challenge for autonomous systems. Existing methods often trade off long-term guarantees for fast real-time control and cannot adapt to variability in human preferences or risk tolerance. To address these limitations, we propose a language-guided adaptive probabilistic safety certificate (PSC) framework that guarantees long-term safety for stochastic systems under environmental uncertainty while accommodating diverse human preferences. The proposed framework integrates natural-language inputs from users and Bayesian estimators of the environment into adaptive safety certificates that explicitly account for user preferences, system dynamics, and quantified uncertainties. Our key technical innovation leverages probabilistic invariance—a generalization of forward invariance to a probability space—to obtain myopic safety conditions with long-term safety guarantees that integrate language guidance, model information, and quantified uncertainty. We validate the framework through numerical simulations of autonomous lane-keeping with human-in-the-loop guidance under uncertain and extreme road conditions, demonstrating enhanced safety–performance trade-offs, adaptability to changing environments, and personalization to different user preferences.
Achieving long-term safety in uncertain/extreme environments while accounting for human preferences remains a fundamental challenge for autonomous systems. Existing methods often trade off long-term guarantees for fast real-time control and cannot adapt to variability in human preferences or risk tolerance. To address these limitations, we propose a language-guided adaptive probabilistic safety certificate (PSC) framework that guarantees long-term safety for stochastic systems under environmental uncertainty while accommodating diverse human preferences. The proposed framework integrates natural-language inputs from users and Bayesian estimators of the environment into adaptive safety certificates that explicitly account for user preferences, system dynamics, and quantified uncertainties. Our key technical innovation leverages probabilistic invariance—a generalization of forward invariance to a probability space—to obtain myopic safety conditions with long-term safety guarantees that integrate language guidance, model information, and quantified uncertainty. We validate the framework through numerical simulations of autonomous lane-keeping with human-in-the-loop guidance under uncertain and extreme road conditions, demonstrating enhanced safety–performance trade-offs, adaptability to changing environments, and personalization to different user preferences.
Risk estimation: B-spline representations in physics-informed learning
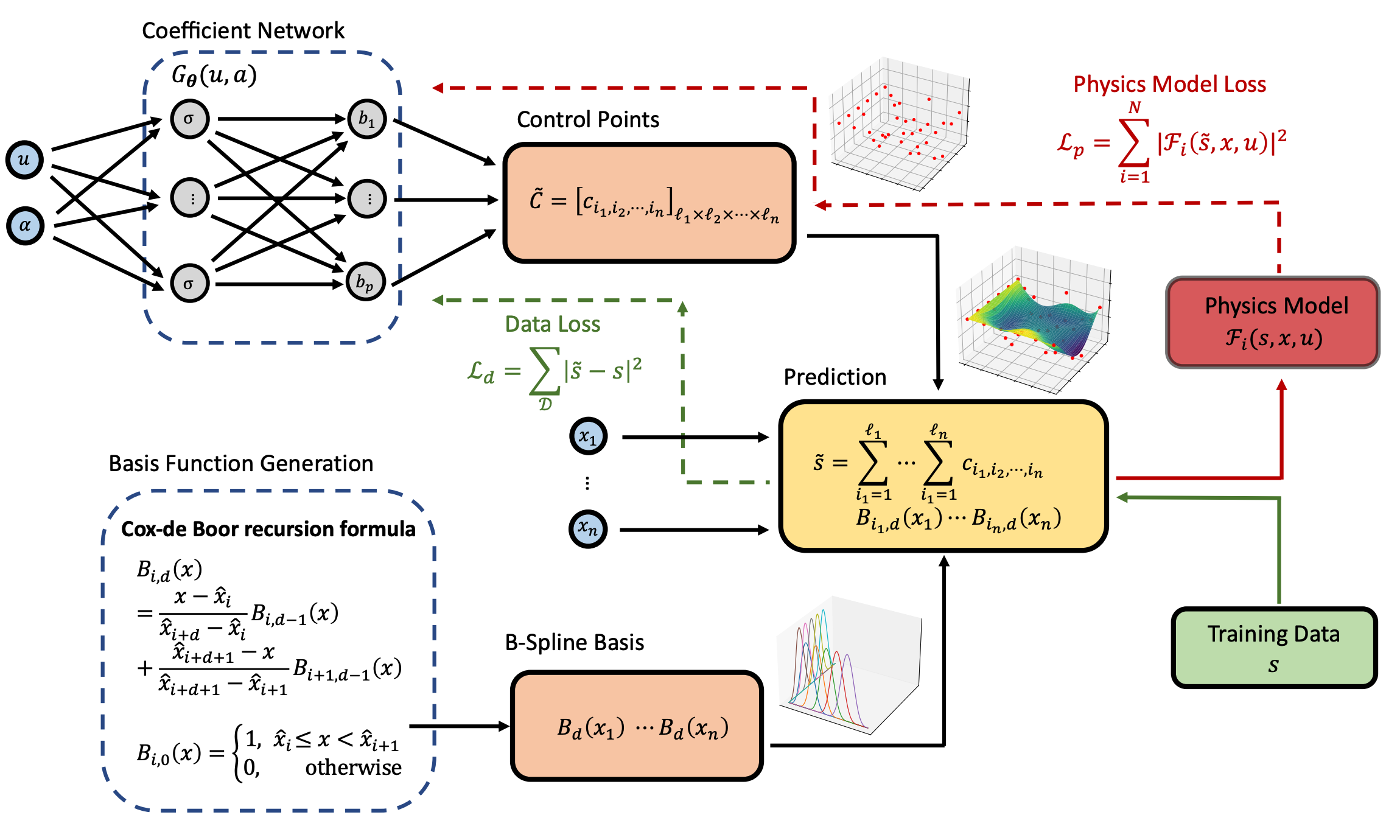
B-spline representations provide a powerful and structured way to incorporate physics into learning PDE solutions, especially when dealing with varying system dynamics, initial conditions, and boundary conditions. Instead of predicting solution values across dense spatial–temporal grids, a physics-informed B-spline model learns a compact set of control points whose associated B-spline basis functions generate the full solution surface. This parametrization offers several advantages: it enforces initial and Dirichlet boundary conditions exactly through the construction of the basis, enables efficient and analytically tractable computation of derivatives for PDE residual losses, and yields a lower-dimensional and more stable learning target compared to raw field values. As a result, B-spline–based physics-informed learning improves the efficiency–accuracy tradeoff, handles nonhomogeneous and functional variations in problem setups, and provides a natural path toward theoretical analysis, including universal approximation guarantees for families of PDEs.These strengths make physics informed learning with B-spline representations particularly effective for long-term risk quantification—where fast yet accurate online estimation for varying systems is essential—and broadly applicable to other control and PDE-related problems that benefit from structured and stable solution representations.
Safe control: Long-term safety for stochastic systems
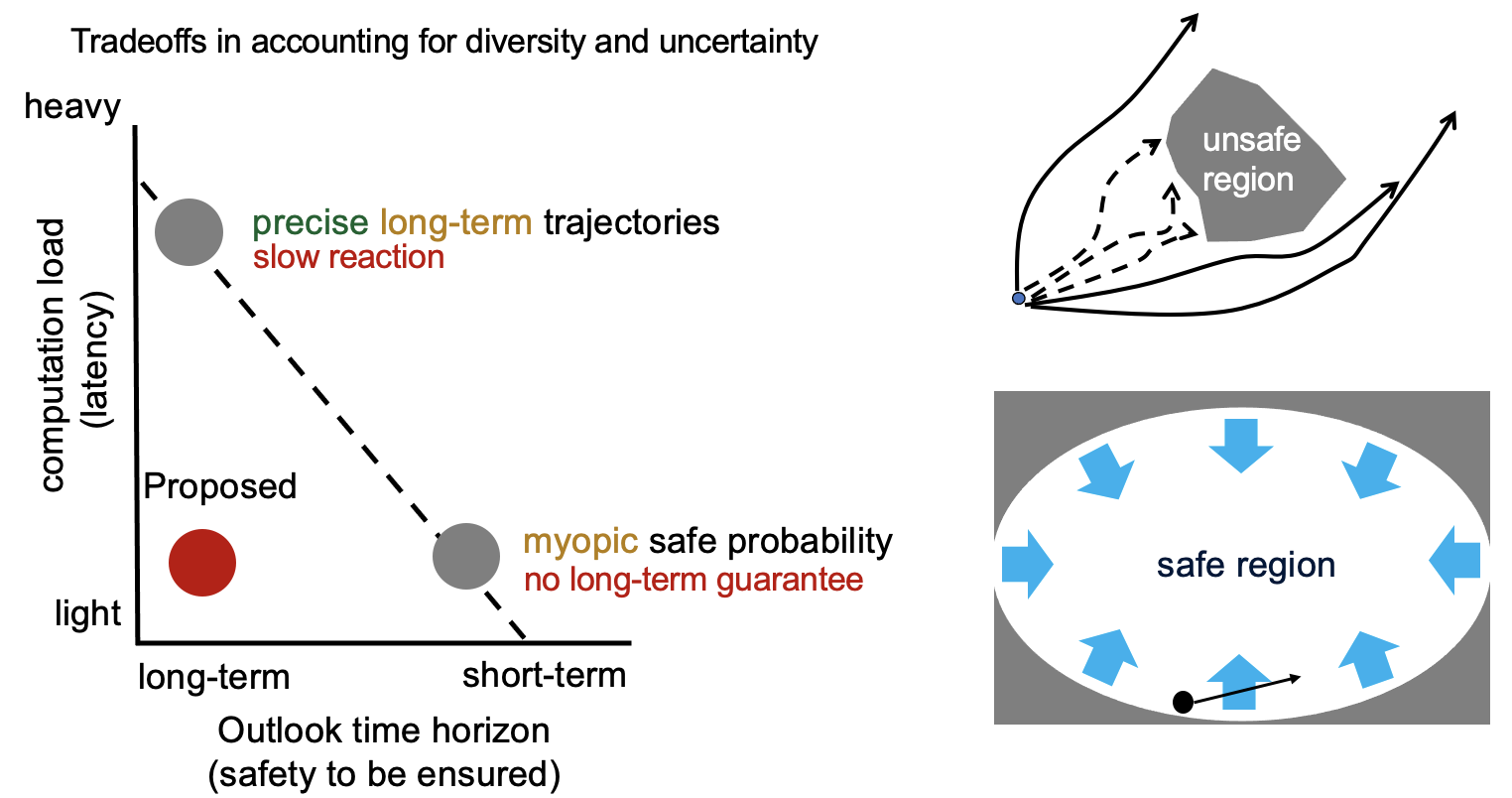 With the presence of stochastic uncertainties, a myopic controller that ensures safe probability in infinitesimal time intervals may allow the accumulation of unsafe probability over time and result in a small long-term safe probability. Meanwhile, increasing the outlook time horizon may lead to significant computation burdens and delayed reactions, which also compromises safety. To tackle this challenge, we define a new notion of forward invariance on ‘probability space’ as opposed to the safe regions on state space. This new notion allows the long-term safe probability to be framed into a forward invariance condition, which can be efficiently evaluated. We build upon this safety condition to propose a controller that works myopically yet can guarantee long-term safe probability or fast recovery probability. The proposed controller ensures the safe probability does not decrease over time and allows the designers to directly specify safe probability.
With the presence of stochastic uncertainties, a myopic controller that ensures safe probability in infinitesimal time intervals may allow the accumulation of unsafe probability over time and result in a small long-term safe probability. Meanwhile, increasing the outlook time horizon may lead to significant computation burdens and delayed reactions, which also compromises safety. To tackle this challenge, we define a new notion of forward invariance on ‘probability space’ as opposed to the safe regions on state space. This new notion allows the long-term safe probability to be framed into a forward invariance condition, which can be efficiently evaluated. We build upon this safety condition to propose a controller that works myopically yet can guarantee long-term safe probability or fast recovery probability. The proposed controller ensures the safe probability does not decrease over time and allows the designers to directly specify safe probability.
We also developed a long-term probabilistic safety certificate for multi-agent systems with stochastic uncertainties and information sharing constraints. This method works with safety and performance specifications specified by non-differentiable barrier functions in a distributed manner that intelligently coordinate multi-agent systems without centralized computing.
Safe Control: Rethinking Safe Control in the Presence of Self-Seeking Humans
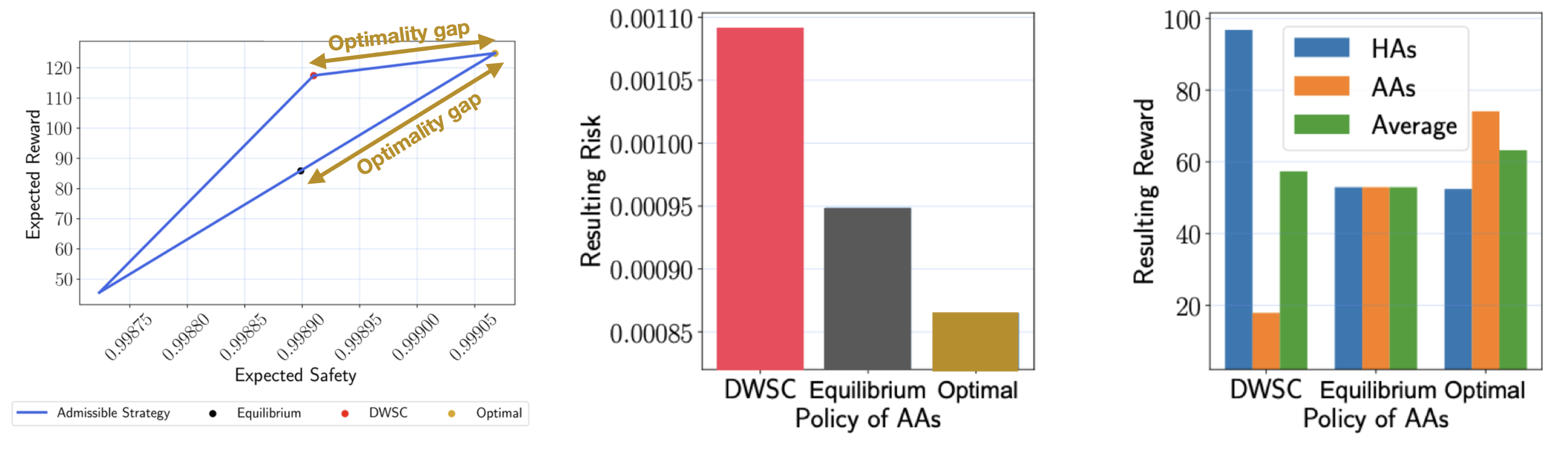 Safe control methods are often designed to behave safely even in worst-case human uncertainties. Such design can cause more aggressive human behaviors that exploit its conservatism and result in greater risk for everyone. However, this issue has not been systematically investigated previously. We used an interaction-based payoff structure from evolutionary game theory to model how prior human-machine interaction experience causes behavioral and strategic changes in humans in the long term. The results demonstrate that deterministic worst-case safe control techniques and equilibrium-based stochastic methods can have worse safety and performance trade-offs than a basic method that mediates human strategic changes. This finding suggests an urgent need to fundamentally rethink the safe control framework used in human-technology interaction in pursuit of greater safety for all.
Safe control methods are often designed to behave safely even in worst-case human uncertainties. Such design can cause more aggressive human behaviors that exploit its conservatism and result in greater risk for everyone. However, this issue has not been systematically investigated previously. We used an interaction-based payoff structure from evolutionary game theory to model how prior human-machine interaction experience causes behavioral and strategic changes in humans in the long term. The results demonstrate that deterministic worst-case safe control techniques and equilibrium-based stochastic methods can have worse safety and performance trade-offs than a basic method that mediates human strategic changes. This finding suggests an urgent need to fundamentally rethink the safe control framework used in human-technology interaction in pursuit of greater safety for all.
Risk estimation: Physics-informed learning for long-term risk estimation
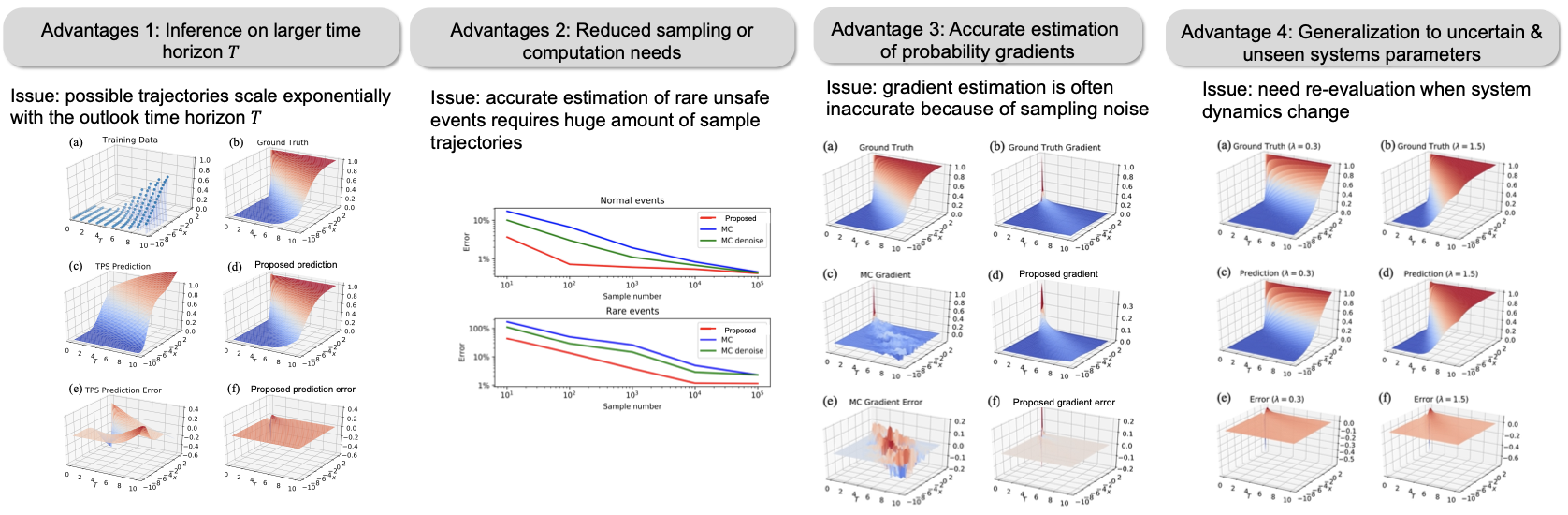
Accurate estimates of long-term risk probabilities and their gradients are critical for many stochastic safe control methods. However, computing such risk probabilities in real-time and in unseen or changing environments is challenging. Monte Carlo (MC) methods cannot accurately evaluate the probabilitiesand their gradients as an infinitesimal devisor can amplify the sampling noise. We propose an efficient method to evaluate the probabilities of long-term risk and their gradients. The proposed method exploits the fact that long-term risk probability satisfies certain partial differential equations (PDEs), which characterize the neighboring relations between the probabilities, to integrate MC methods and physics-informed neural networks. Numerical results show the proposed method has better sample efficiency, generalizes well to unseen regions, and can adapt to systems with changing parameters. The proposed method can also accurately estimate the gradients of risk probabilities, which enables first- and second-order techniques on risk probabilities to be used for learning and control. We are interested in theoretical analysis and extension to end-to-end learning-based safe control with the proposed risk estimation framework.
Applications: Autonomous Driving with Uncertainties and Occlusions
 We derive a sufficient condition to ensure long-term safe probability when there are uncertainties in system parameters. We test the proposed technique numerically in a few driving scenarios. The resulting control action systematically mediates behaviors based on uncertainties and can find safer actions even with large uncertainties.
We derive a sufficient condition to ensure long-term safe probability when there are uncertainties in system parameters. We test the proposed technique numerically in a few driving scenarios. The resulting control action systematically mediates behaviors based on uncertainties and can find safer actions even with large uncertainties.
We propose a probability-based predictive controller that is able to guarantee long-term safety under occlusions without being over-conservative. We verify our method with numerical and onboard experiments on a visual occluded pedestrian crossing scenario. We show that proposed controller can handle latent risks caused by on-road interactions in real-time, and is easy to design with transparency to the exposed risks.
Applications: A Learning and Control Perspective for Microfinance
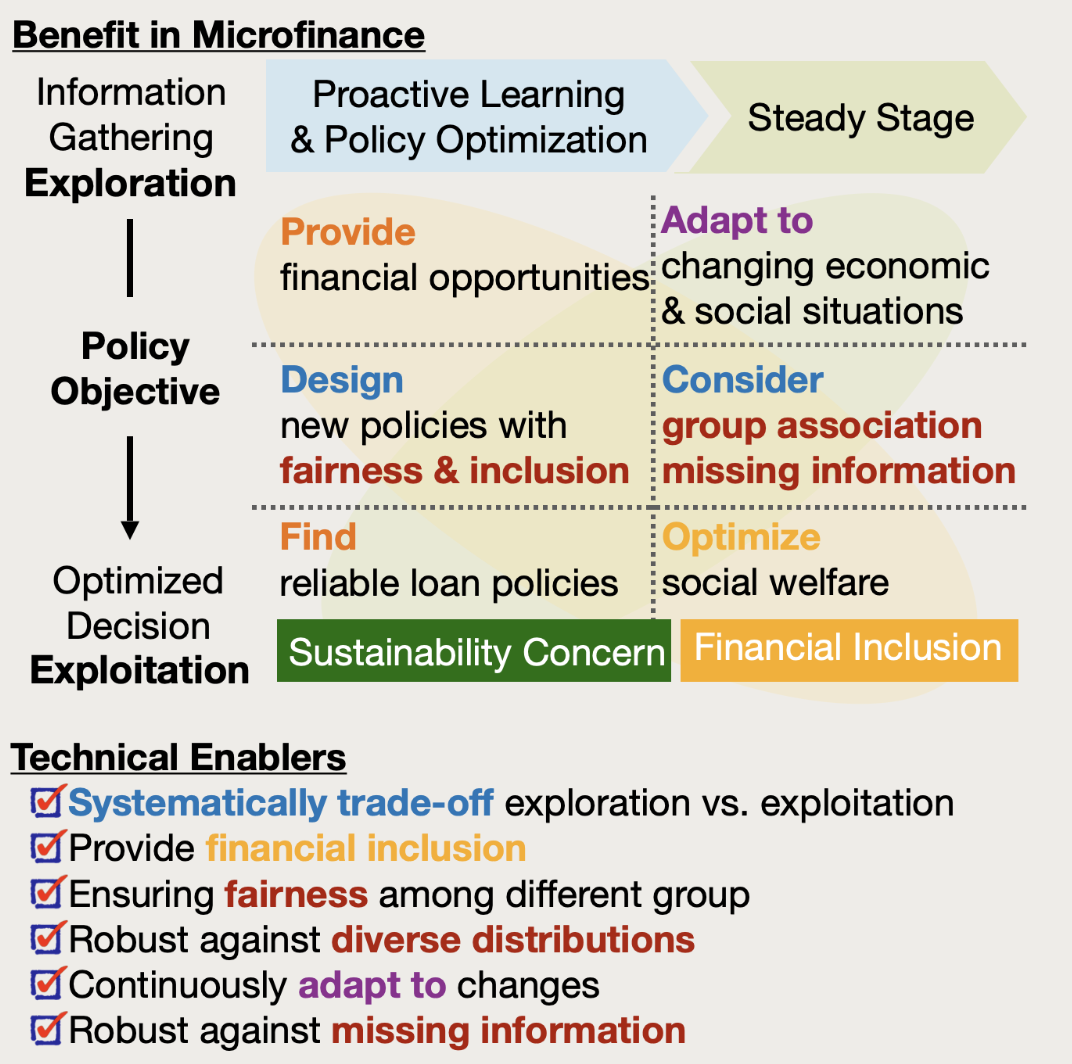 We propose a novel control-theoretical microfinance model and propose an algorithm for learning loan approval policies.
We propose a novel control-theoretical microfinance model and propose an algorithm for learning loan approval policies.
Our methods can make robust decisions before enough loans are given to accurately estimate the default probability and credit scores by directly learning the optimal policy parameters. Our model accounts for missing information and group liability, and policy learning processes converge to optimal policy parameters in the presence of both. In addition, our algorithm can systematically optimize competing objectives such as risks, socio-economic impacts, and active and passive fairness among different groups.
Robust control: Achieving robustness in large-scale complex networks
 A major challenge in the design of autonomous systems is to achieve robustness and efficiency despite using interconnected components with limited sensing, actuation, communication, and computation capabilities. To tackle this challenge, we develop the fundamental theory in learning and control for autonomous systems. Here, autonomous systems are broadly defined (human sensorimotor system, autonomous driving systems, see below for more examples). Below, we list some of the ongoing projects.
A major challenge in the design of autonomous systems is to achieve robustness and efficiency despite using interconnected components with limited sensing, actuation, communication, and computation capabilities. To tackle this challenge, we develop the fundamental theory in learning and control for autonomous systems. Here, autonomous systems are broadly defined (human sensorimotor system, autonomous driving systems, see below for more examples). Below, we list some of the ongoing projects.
From optimality to robustness: Most non-asymptotic performance guarantees for reinforcement learning in linear dynamics are centered around optimality. However, optimality does not imply robustness (e.g. having stability margin), which is critical in achieving stable and safe performance when implemented physically. In this project, we aim to provide better robustness to the learning and control methods by borrowing tools from robust control.
Effective architectures for integrating model-driven and data-driven control: Most existing methods either take a model-driven approach for systems with clear models or a data-driven approach for systems whose dynamics are hard to model. In contrast, human achieves remarkable robustness to varying dynamics/environment/tasks by using layered control architectures that exploit the knowledge on partial dynamics and the flexibility of model-free learning. Drawing insights from sensorimotor control, we study the effective layered architectures that integrate data-driven learning and model-driven control to achieve better robustness.
Neuroscience and biology: Integrating neurophysiology and sensorimotor
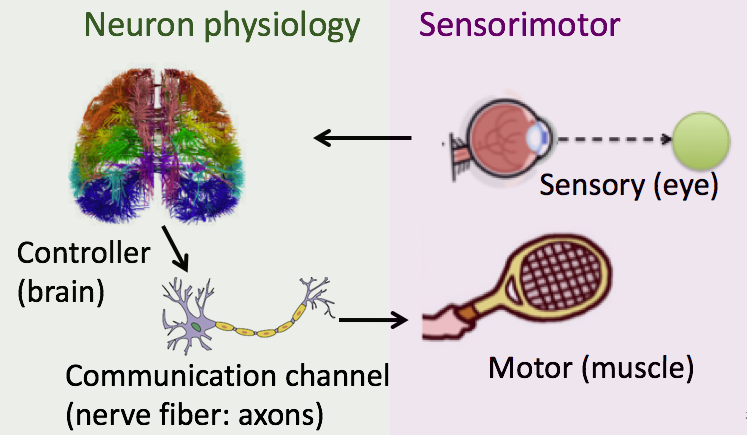
Neuroscience provides rich insights into the effective layered architectures that achieve remarkably robust control despite components that may be slow, inaccurate, distributed, or noisy. While enormous progress is being made in understanding both the components and overall system behavior, less progress has been made in connecting these due to the lack of theoretical foundations that capture the component level (neurophysiological) tradeoffs and the system level (sensorimotor control, which uses the component in control) from a holistic perspective. We develop the theoretical foundation to bridge this gap.
Through this bridge, we aim to interpret the existing insights on the component and system from a holistic perspective. In particular, we are excited that this perspective helps us understand what effective layered architectures allow for robust (fast and accurate) performance to be achieved even with slow or inaccurate components.
Our prior work made an initial step toward this objective by characterizing the tradeoffs between information rate and transmission delay in peripheral nerve fibers (hardware speed-accuracy-tradeoffs) and the resulting system speed-accuracy-tradeoffs in sensorimotor tasks such as visual tracking, driving, and reaching. The system SATs can be improved by having a broad distribution of delay and rate across the population of incoming sensory fibers within levels by (i.e. having a broad distribution within a single modality or single nerve bundle) or between layers (having a multimodal distribution across different modalities, such as a combination of visual and vestibular input for oculomotor stabilization). We term this concept as "diversity enabled sweet spot (DESS).'' Interestingly, DESS can be observed in a variety of systems, both natural and technological: the size principle for the recruitment of motor units, Fitts' Law in reaching, sensorimotor learning, immune response, transportation, smart grid.
Autonomous driving: attaining safety using affordable hardware
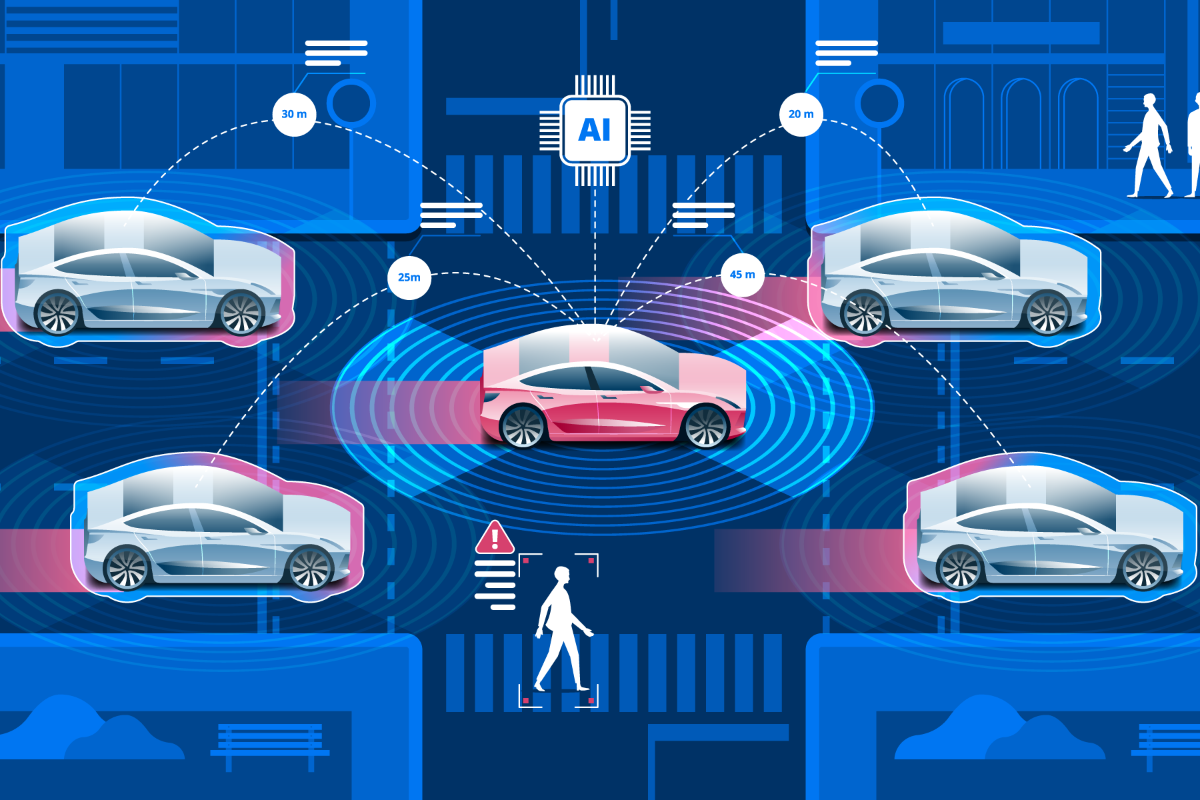 Autonomous driving can fundamentally change our life and transportation. However, there are tremendous challenges in ensuring safety and making autonomous vehicles more affordable and modular. We aim to enhance its safety and affordability using robust learning and control methods and bio-inspired architectures.
Autonomous driving can fundamentally change our life and transportation. However, there are tremendous challenges in ensuring safety and making autonomous vehicles more affordable and modular. We aim to enhance its safety and affordability using robust learning and control methods and bio-inspired architectures.
Past projects:
Smart grid: Enhancing scalability and efficiency in real-time scheduling
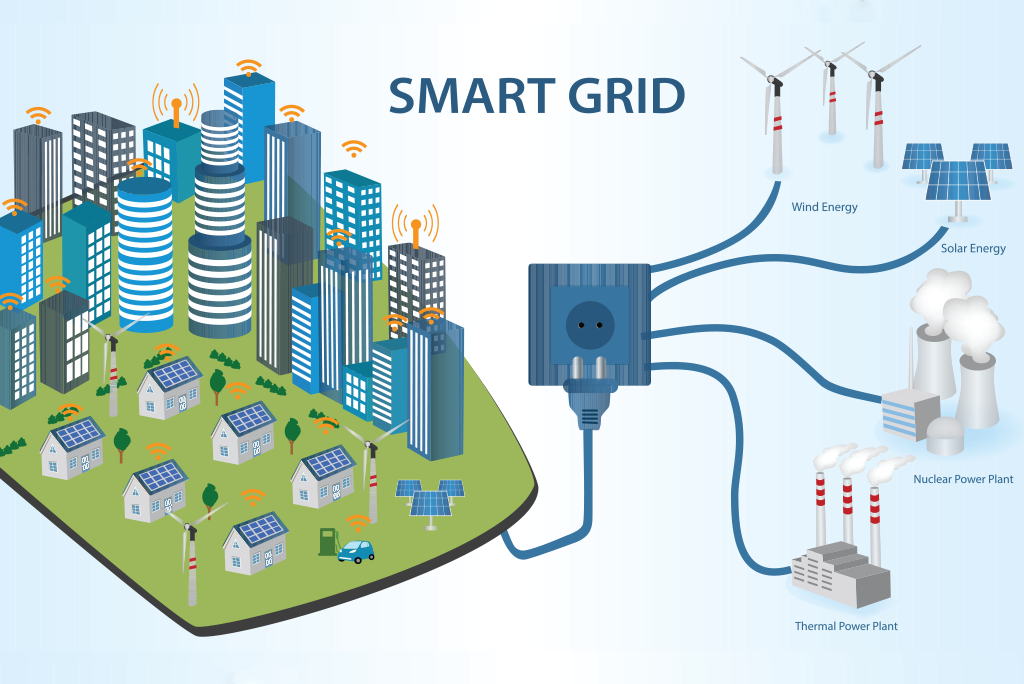 Large-scale service systems, such as power stations and cloud computing, present tremendous challenges in terms of controlling their strain on the power grid and the cloud. Meanwhile, these systems also present a great opportunity to exploit the flexibility in service speed and duration of each job. In view of these challenges and opportunities, we developed low-complexity online scheduling algorithms that balance system performance and quality-of-service. Our algorithms, when implemented in electric vehicle charging stations, can help achieve stable and predictable power consumption.
Large-scale service systems, such as power stations and cloud computing, present tremendous challenges in terms of controlling their strain on the power grid and the cloud. Meanwhile, these systems also present a great opportunity to exploit the flexibility in service speed and duration of each job. In view of these challenges and opportunities, we developed low-complexity online scheduling algorithms that balance system performance and quality-of-service. Our algorithms, when implemented in electric vehicle charging stations, can help achieve stable and predictable power consumption.
Security: Improving fault tolerance in estimation and inference
 A cyber-physical system is vulnerable to various faults due to its distributed nature. Examples of these faults are hijacking, natural disasters, infrastructure wear, which can be caused by either malicious agents or unforeseen accidents. Therefore, the control of such systems should be equipped with safety-critical processes that tolerate a wide range of faults. We proposed both a state estimator and inference algorithms for system parameters, which have provable performance guarantees in the presence of sparse faults. Our algorithms, when incorporated into the control of cyber-physical systems, can help mitigate human injuries or economic damage to these faults.
A cyber-physical system is vulnerable to various faults due to its distributed nature. Examples of these faults are hijacking, natural disasters, infrastructure wear, which can be caused by either malicious agents or unforeseen accidents. Therefore, the control of such systems should be equipped with safety-critical processes that tolerate a wide range of faults. We proposed both a state estimator and inference algorithms for system parameters, which have provable performance guarantees in the presence of sparse faults. Our algorithms, when incorporated into the control of cyber-physical systems, can help mitigate human injuries or economic damage to these faults.