Recent Publications
The recent publications from Carnegie Mellon University Control & Learning Group. For most recent publications and research, check out Google Scholar and Research.

Stabilizing LTI Systems under Partial Observability: Sample Complexity and Fundamental Limits
Ziyi Zhang, Yorie Nakahira, Guannan Qu
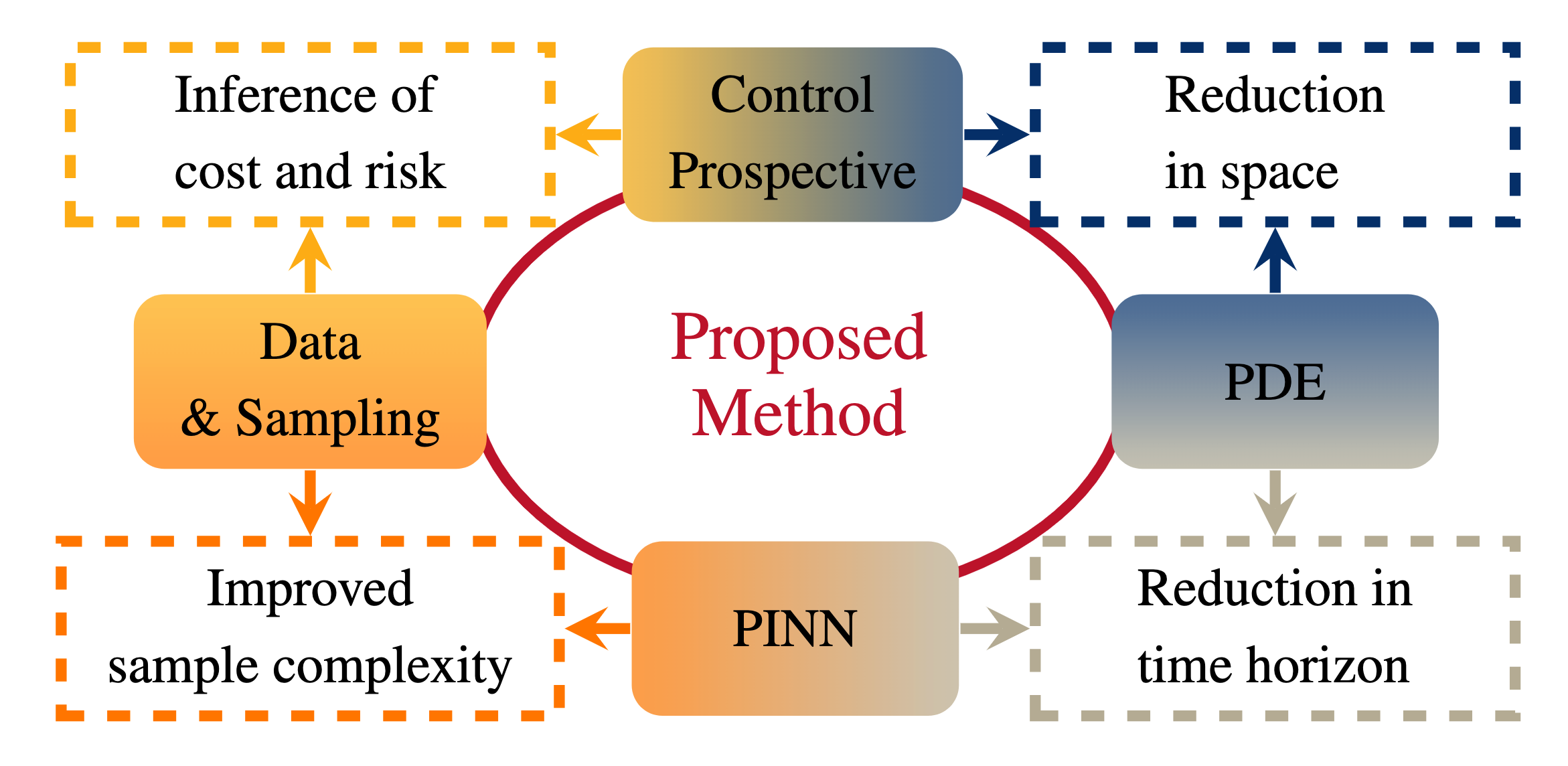
Physics-Informed Representation and Learning: Control and Risk Quantification
Zhuoyuan Wang, Reece Keller, Xiyu Deng, Kenta Hoshino, Takashi Tanaka, Yorie Nakahira
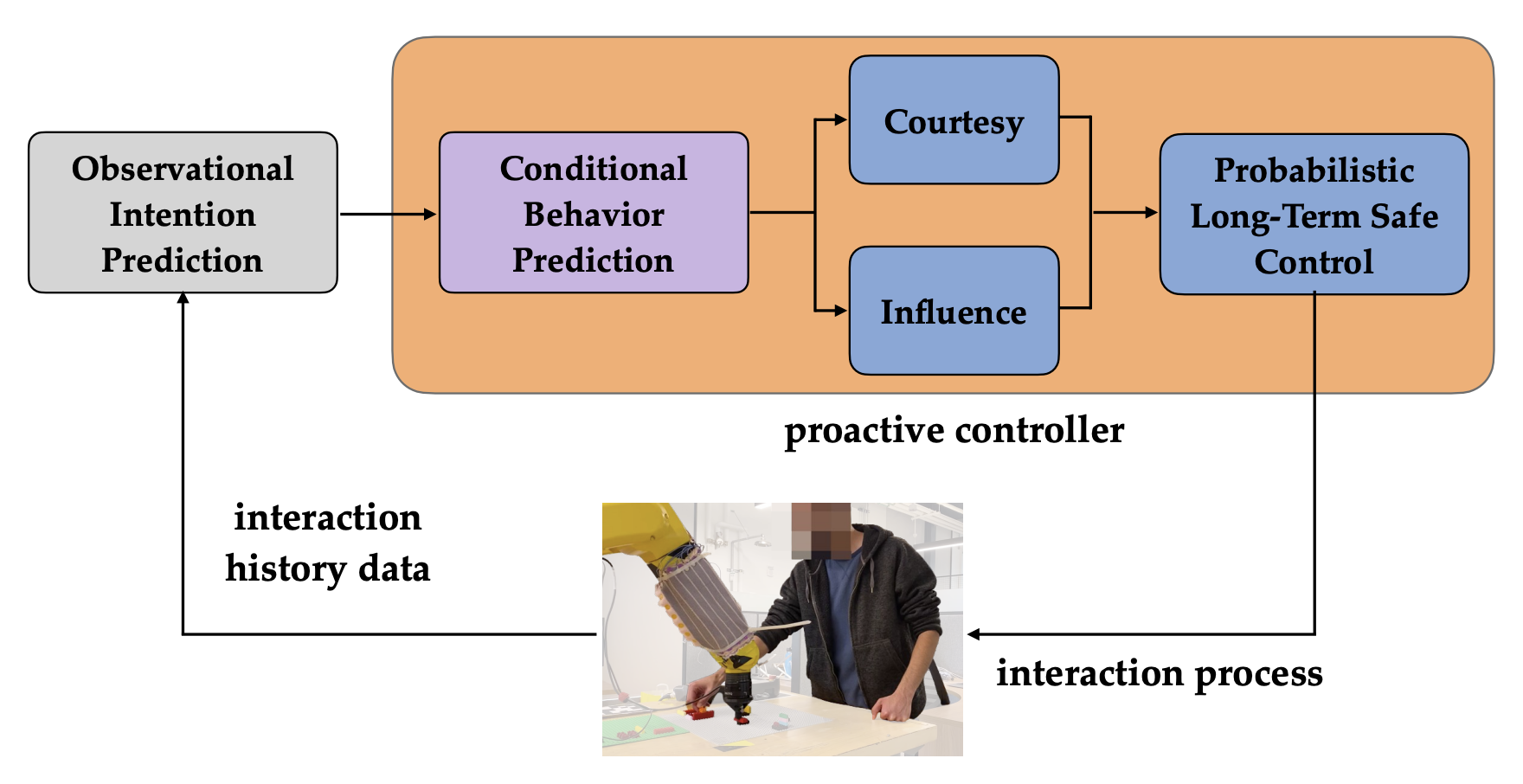
Towards Proactive Safe Human-Robot Collaborations via Data-Efficient Conditional Behavior Prediction
Ravi Pandya*, Zhuoyuan Wang*, Yorie Nakahira, Changliu Liu
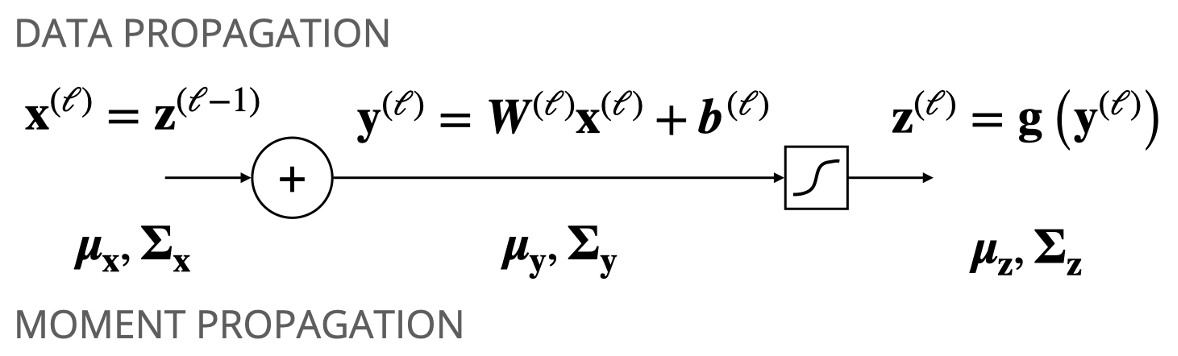
An Analytic Solution to Covariance Propagation in Neural Networks
Oren Wright, Yorie Nakahira, José M. F. Moura
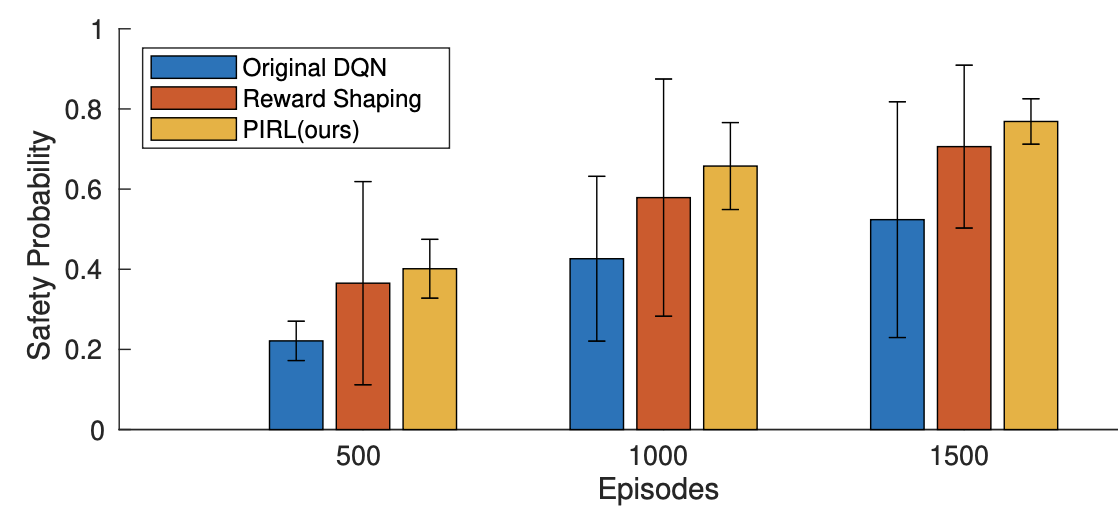
Physics-informed RL for Maximal Safety Probability Estimation
Hikaru Hoshino, Yorie Nakahira
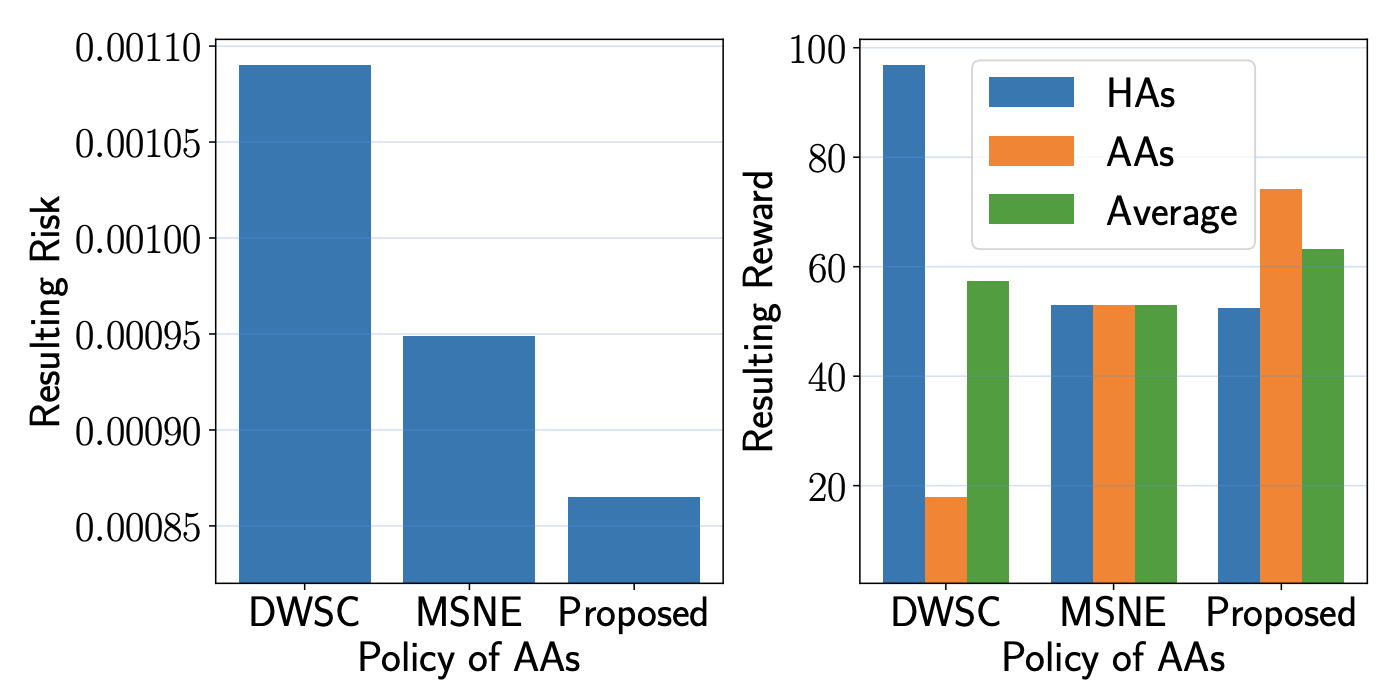
Rethinking Safe Control in the Presence of Self-Seeking Humans
Zixuan Zhang, AL-Sunni Maitham, Haoming Jing, Hirokazu Shirado, Yorie Nakahira
Scalable Long-Term Safety Certificate for Large-Scale Systems
Kenta Hoshino, Zhuoyuan Wang, Yorie Nakahira
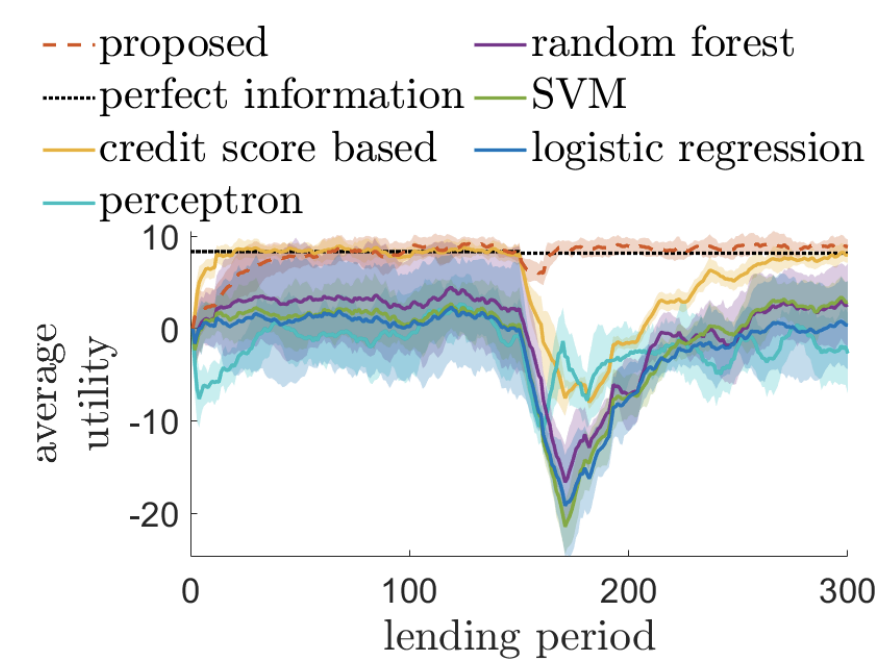
A Learning and Control Perspective for Microfinance
Xiyu Deng, Christian Kurniawan, Adhiraj Chakraborty, Assane Gueye, Niangjun Chen, Yorie Nakahira
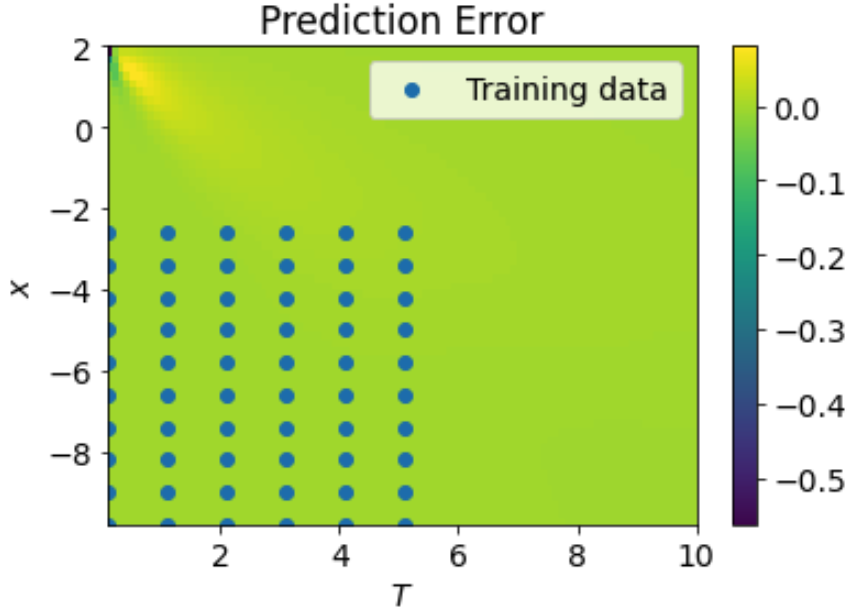
A Generalizable Physics-informed Learning Framework for Risk Probability Estimation
Zhuoyuan Wang, Yorie Nakahira
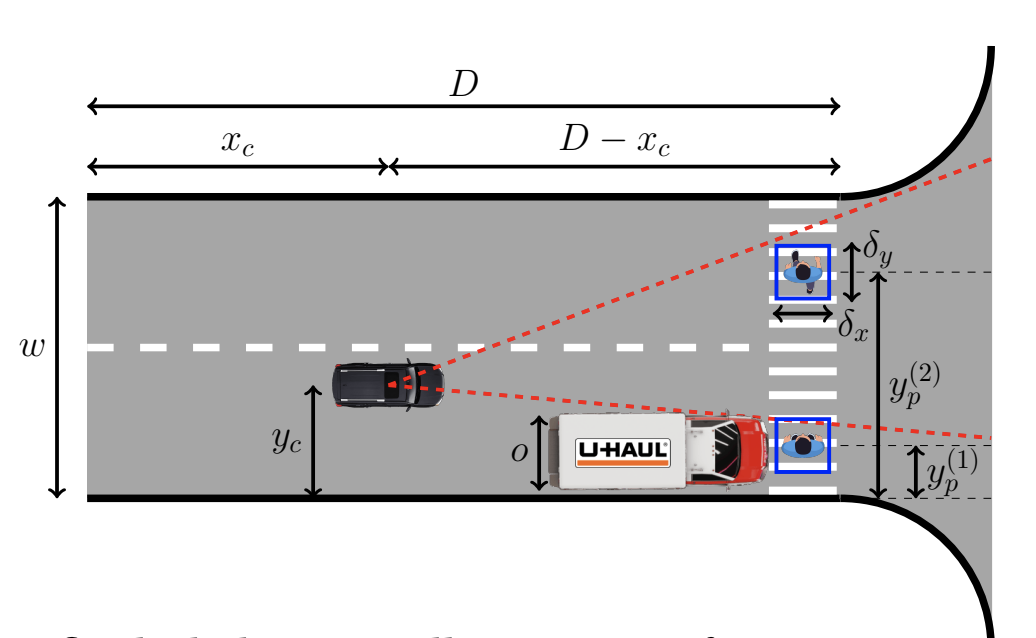
An Occlusion-and Interaction-Aware Safe Control Strategy for Autonomous Vehicles
Siddharth Gangadhar, Zhuoyuan Wang, Kofi Poku, Naoya Yamada, Kohei Honda, Yorie Nakahira, Hiroyuki Okuda, Tatsuya Suzuki
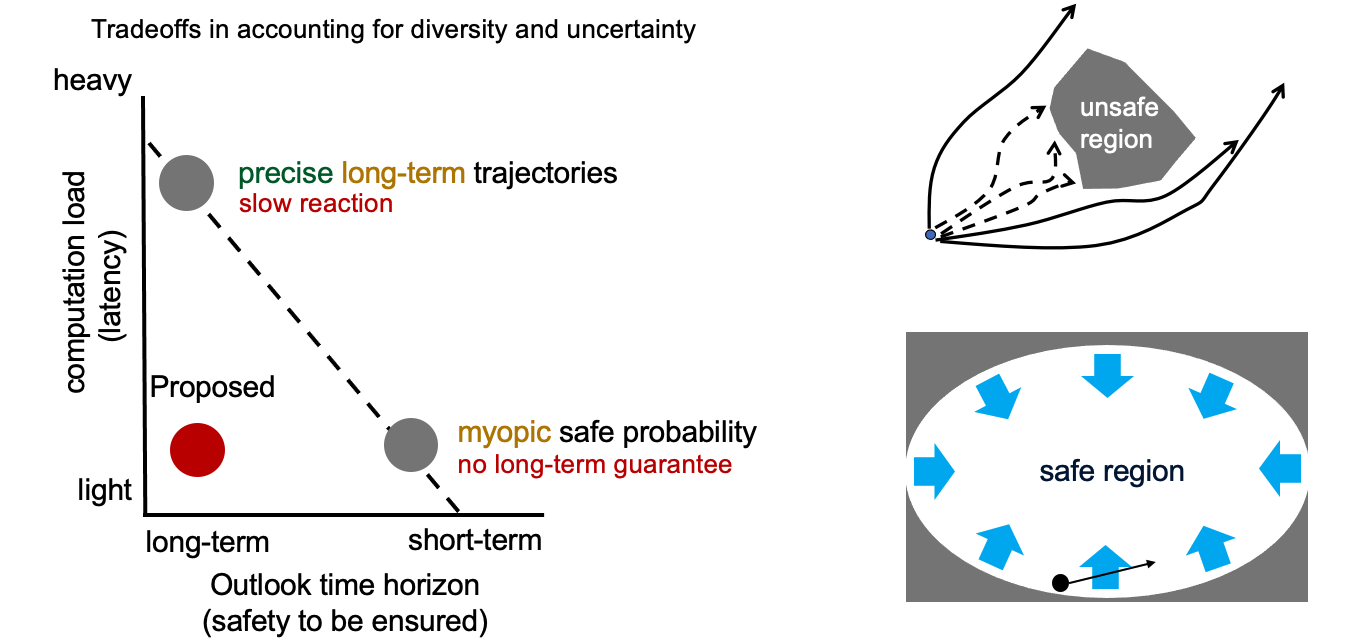
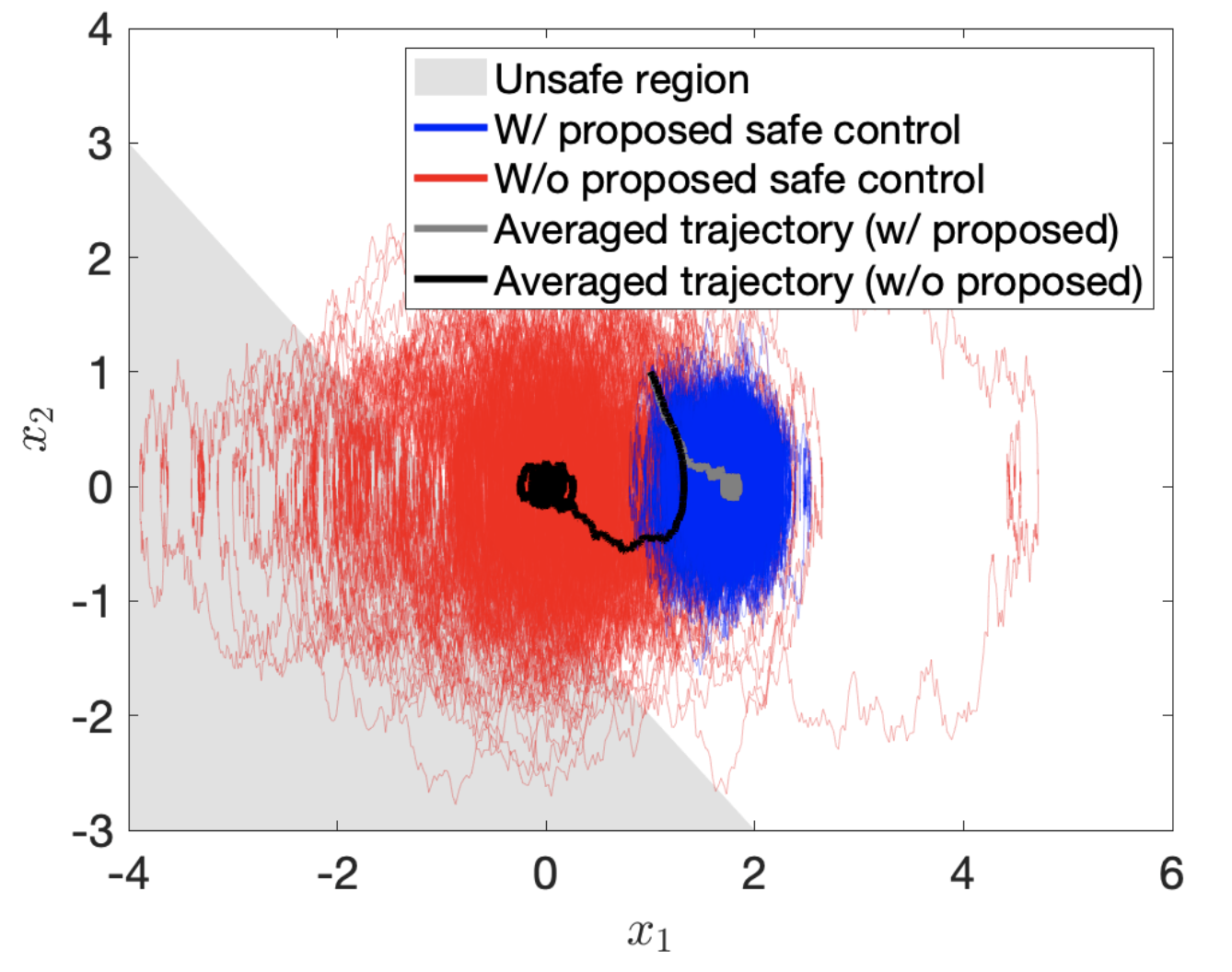
Myopically Verifiable Probabilistic Certificate for Long-term Safety
Zhuoyuan Wang*, Haoming Jing*, Christian Kurniawan, Albert Chern, Yorie Nakahira