|
|
||
|
|
|
 Robot's Success Could Lead to Future Solar-Powered Exploration of Planets
Robot's Success Could Lead to Future Solar-Powered Exploration of Planets
Hyperion, a solar-powered robot developed by researchers at the Robotics Institute with support from NASA, successfully demonstrated a concept in the Canadian Arctic this summer that could pave the way for future long-term robotic exploration of distant planets and moons.
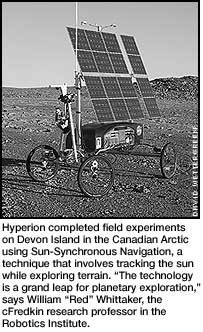
Hyperion completed field experiments on Devon Island this past July using Sun-Synchronous Navigation, a technique that involves tracking the sun while exploring terrain. The robot navigated the island during a period of 24-hour sunlight, exploring the terrain it encountered while simultaneously monitoring its solar panels to ensure that they collected enough energy to complete each segment of its planned traverse.
During the initial experiment on July 19, Hyperion traveled 6.1 kilometers and made history by circumnavigating the Von Braun Planitia, an area near Devon Island's Haughton Crater. The crater is the subject of an ongoing study by the NASA Haughton-Mars Project (www.arctic-mars.org) because of its apparent similarity to the terrain on Mars.
About 95 percent of Hyperion's circuit was completed autonomously, with the remainder under remote supervision, said project manager David Wettergreen, a Robotics Institute research scientist. The experi-ment began and ended with the robot's batteries fully charged and ready to continue operation.
As it encountered the unknown terrain, Hyperion sometimes fell behind its timetable for operation, but each time it caught up when it emerged into a more easily navigable region.
"The ability of the robot's perception and navigation system to find routes was very impressive," Wettergreen said. "Qualitatively, Hyperion wiggled through some pretty tight spots."
Wettergreen said the robot detected and evaluated "thousands of obstacles" and made "tens of thousands" steering corrections.
In an extended experiment, which ended July 22, Hyperion covered 9.1 kilometers, traveling through rougher terrain including rocky slopes and mud flats, and was challenged with a mission plan that at times put desired goal locations in conflict with the position of the sun.
Wettergreen said the extended experiment intentionally pushed the limits of Hyperion's capability to find where further research is necessary. Hyperion had greater difficulty, but arrived at its destination on schedule with charged batteries. In only one instance was manual intervention required to correct a steering problem.
"There is more work to do to move new technologies from research into development, but the fundamental ideas have been proven," Wettergreen said.
"The technology is a grand leap for planetary exploration," said William "Red" Whittaker, the Fredkin research professor in the Robotics Institute and principal investigator of the Hyperion project.
Wettergreen emphasized that Hyperion is a "concept vehicle" designed to operate only on earth. He said the objective is to develop technologies, like reasoning about terrain, sunlight and power, which are broadly applicable to robotic explorers but specifically tailored to robots that could operate at the poles of the moon or in the polar regions of Mars.
In addition to Whittaker and Wettergreen, Hyperion team members include Bernadine Diaz, Ben Shamah, Jim Teza, Paul Thompkins, Chris Uhrman and Mike Wagner.
For more information about the Hyperion project visit the Web at http://www.frc.ri.cmu.edu/sunsync.
Anne Watzman
|
|
This Issue's Headlines || Carnegie Mellon News Home || Carnegie Mellon Home |
||