New Paper: Edge-based Live Learning for Robot Survival
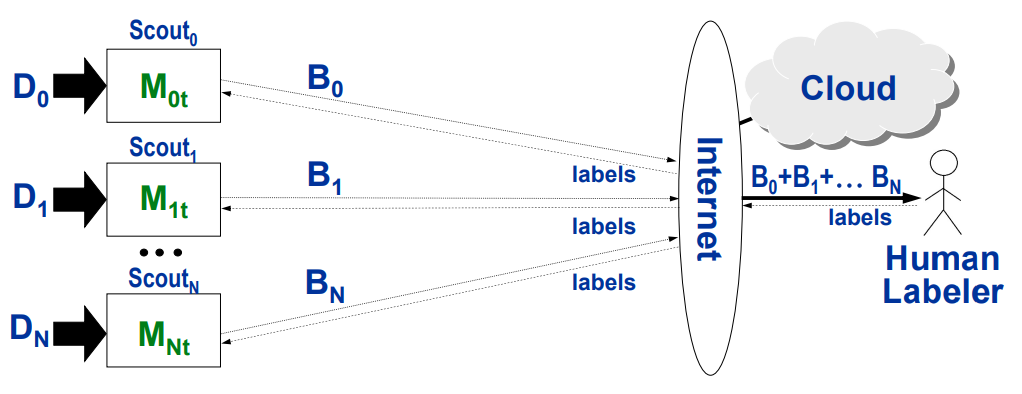
We introduce survival-critical machine learning (SCML), in which a robot encounters dynamically evolving threats that it recognizes via machine learning (ML), and then neutralizes. We model survivability in SCML, and show the value of the recently developed approach of Live Learning. This edge-based ML technique embodies an iterative human-in-the-loop workflow that concurrently enlarges the training set, trains the next model in a sequence of “best-so-far” models, and performs inferencing for both threat detection and pseudo-labeling. We present experimental results using datasets from the domains of drone surveillance, planetary exploration, and underwater sensing to quantify the effectiveness of Live Learning as a mechanism for SCML.
E. Sturzinger, J. Harkes, P. Pillai and M. Satyanarayanan, "Edge-based Live Learning for Robot Survival," in IEEE Transactions on Emerging Topics in Computing, doi: 10.1109/TETC.2024.3479082.
Read the Paper