|
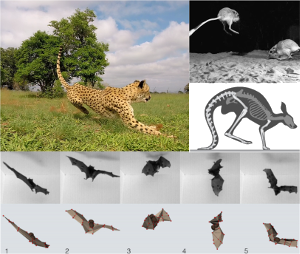
Unusual Appendages:
Novel, multi-modal, or multi-functional uses for
limbs, tails, and other body parts
RSS 2018 Workshop
Friday, June 29th, 2018
Aaron M. Johnson, Amir Patel, and Tom Libby
Assistant Professor of Mechanical Engineering, Carnegie Mellon University, Pittsburgh, PA, USA
Senior Lecturer of Electrical Engineering, University of Cape Town, South Africa
Postdoctoral Fellow in Electrical Engineering, University of Washington, Seattle, WA, USA
|
Overview
Mobile robots locomote by pushing on the environment with appendages: legs and wheels
on ground, wings or propellers in the air, etc. Intuitively, appendages are generally optimized
for the chosen modality. By contrast, animal appendages are diverse and incredibly
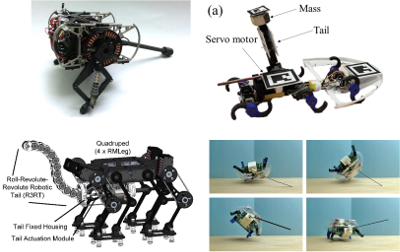
versatile, enabling multi-modal utility across many tasks. Robots can also benefit from more
creative use of appendages: swinging tails that generate inertial forces, walking on wings,
swimming with legs, and more. This workshop will broaden our understanding of
appendages by exploring their design for novel, multi-modal or multi-functional interactions
with the environment or inertial forces. We will explore diverse appendages in animals and
robots including tails, wheels, legs, arms, gyros, tracks, and more. What modalities can be
harnessed to aid locomotion, and how is morphology shaped by task performance? Robots
are not constrained by evolutionary history, so their appendages should be even more
diverse than those found in nature. What new appendages can we imagine that add
functionality, agility or robustness? The format will consist of a number of invited and
contributed presentations from biologists and roboticists on cutting edge research in the
field, as well as an open discussion prompted by the questions listed below. The workshop
will also accept submissions from non-invited speakers for consideration.
Format
This workshop falls under the "Mechanisms and Design" special theme for RSS 2018.
The organizers will assign a chair to each session who will be responsible for reading in
advance the material to be presented. In addition to moderating questions from the
workshop participants, the chair will raise specific questions prepared in advance of each
speaker after their talk. Beyond these question periods between speakers, a dedicated
discussion session in the afternoon will provide a venue to summarize the conclusions of the
day's proceedings and consider the future and potential of this line of research. A few
discussion questions will be sent to the presenters and listed on the workshop website in
advance so that participants can have time to prepare and consider their answers.
Presenters will also be encouraged to touch on the following set of overarching topics in their
talks:
- What kinds of appendages exist in animals and robots and how are they used?
- What modalities can appendages engage, and how does multimodality increase
robustness and agility?
- What new capabilities or behaviors arise when adding an appendage to a robot?
- What are the relative merits of specialized appendages and multifunctional
appendages?
- How are the constraints and compromises of multifunctionality negotiated through
design?
After the workshop, we hope to have a journal special issue for which the speakers at the
workshop will be invited. This special issue, as with the workshop, will aim to bring together
the many varied approaches being explored for understanding the design and multi-modal
use of appendages.
Schedule
Schedule of events for Friday, June 29th, 2018 (presenting author marked with a *):
| 09:00 - 09:10 Welcome: Overview, Prospects, and Challenges |
| 09:10 - 10:00 Session 1: Passive and Quasi-static Appendage Use Chair: Tom Libby |
| Jonathan Clark* |
Passive Limbs for Dynamic Running and Climbing |
| Haosen Xing, Baxi Chong, Guillaume Sartoretti, Daniel I. Goldman, and Howie Choset* |
Tail Use in Quadruped Improves Static Stability in Diagonal Sequence Walking Gaits |
| 10:00 - 10:30 Refreshment Break |
| 10:30 - 12:00 Session 2: New Results with Inertial Appendages Chair: Amir Patel |
| Avik De* and Daniel E. Koditschek |
Tail Design and Control for a Tail- and Hip-Energized and -Stabilized Bipedal Hopping Robot |
| Pinhas Ben-Tzvi* |
Design and Control of Bioinspired Articulated Robotic Tails for Stabilization and Maneuvering of Legged Robots |
| James P. Schmiedeler* |
Reaction Wheels as "Appendages" to aid in Underactuated Biped Walking |
| Joseph Norby* and Aaron Johnson |
Towards Energy Optimal Design and Control of Tailed Legged Robot Locomotion |
| Sean W. Gart, Changxin Yan, Ratan Othayoth*, Zhiyi Ren, and Chen Li |
Active Tail Helps Legged Robots Dynamically Traverse Large Gap and Bump Obstacles |
| 12:00 - 13:30 Lunch Break |
| 13:30 - 14:30 Session 3: Beyond Legged Locomotion Chair: Aaron Johnson |
| Ardian Jusufi*, Daniel Vogt, George Lauder, and Robert Wood |
Undulatory Locomotion with a Soft Robotic Fishtail: Steps towards Closing the Loop with Soft Sensors for Body Stiffness Modulation |
| Zachary Manchester* |
Should Satellites Have Tails? |
| Qiyuan Fu*, Sean W. Gart, Thomas W. Mitchel, and Chen Li |
A Novel, Adaptive, Partitioned Gait of Biological Snakes Helps Snake Robots Traverse a Large Step |
| Richard Parker*, Peter Clinton, and Brionny Hooper |
Tree-to-Tree Locomotion for Forest Operations |
| 14:30 - 15:00 Refreshment Break |
| 15:00 - 16:15 Session 4: Reimagining the Tail Chair: Ardian Jusufi |
| Ratan Othayoth, George Thoms, Qihan Xuan, and Chen Li* |
Vibration Helps Robots Explore Locomotion Energy Landscapes and Transition to More Favorable Locomotor Modes |
| Amir Patel*, Philipp Suhrcke, Adam Zeloof, Peter Li, Cameron Selby, and Aaron Johnson |
Tail Aerodynamics in Cheetahs and Robots |
| Ronald S. Fearing* |
Tails for Minimally-Actuated Milli-Robots |
| 16:15 - 17:00 Discussion Session |
Invited Speakers
Invited speakers will have 20 minutes for presentation and 5 minutes for questions.
- Pinhas Ben-Tzvi - Virginia Tech
- Howie Choset - Carnegie Mellon University
- Jonathan Clark - Florida A&M University
- Avik De - University of Pennsylvania
- Ronald Fearing - University of California, Berkeley
- Ardian Jusufi - Max Plank Institute
- Chen Li - Johns Hopkins University
- Zachary Manchester - Stanford
- Amir Patel - University of Cape Town
- Jim Schmiedeler - Notre Dame
Contributed Speakers
We invite anyone interested to submit contributed abstracts for a our
"lightning" (PechaKucha-inspired)
talks. This is a great opportunity for students and to share works-in-progress.
Submission of 1-page extended abstracts is now closed.
Speakers for contributed abstracts will have 4 minutes for presentation and 1 minute for questions.
- Qiyuan Fu - Johns Hopkins University
- Ratan Othayoth - Johns Hopkins University
- Joseph Norby - Carnegie Mellon University
- Richard Parker - Scion - NZ Forest Research Institute
Links