Long Distance Teleoperation - Avatar
The Avatar technology allows operators to drive robots at higher speeds and with greater safety at nearly unlimited stand-off distances, opening new applications for robotics.
Application
Capabilities
Latency compensation
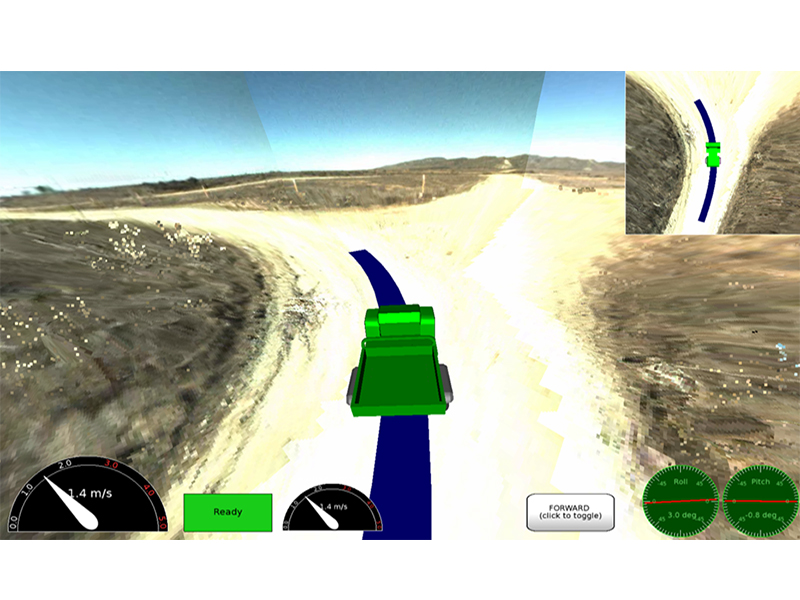
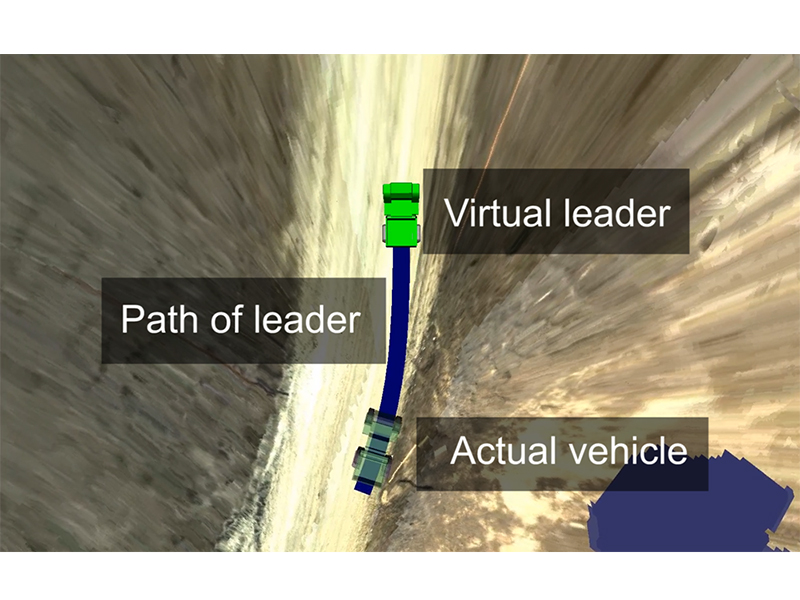
Avatar’s technologies are adapted from the Enhanced Teleoperation program. To fight the effects of latency, Avatar uses 3D sensor data from the unmanned ground vehicle (UGV) to predict its present location based on its past location, its speed, and the current communications lag. An intuitive, immersive 3D teleoperation interface shows the UGV’s present location and provides simulated vehicle controls. Safe areas can be shown in green and dangerous slopes and obstacles in red. A virtual leader shows the predicted location and projected driving path of the UGV. The operator drives using up-to-date, generated 3D video of the virtual leader instead of outdated camera images from the actual UGV.
Long distance teleoperation test
The Avatar project successfully teleoperated an unmanned ground vehicle in California over a ViaSat satellite link from a base station near Washington, DC – a distance of more than 3000 miles on the ground and nearly 100,000 miles of round-trip travel for data and controls. Six operators at the base station drove a drive-by-wire utility vehicle over a 1 kilometer course in California. They communicated with the vehicle through a satellite link that had approximately 0.75 seconds round trip latency. The test compared their driving performance using a standard teleoperation interface (no latency compensation) and using Avatar’s latency-compensated interface.
Photos