Student Designs Robot Leg
When it comes to exploring locomotion, Carnegie Mellon grad student Jonathan Hurst dares to be different.
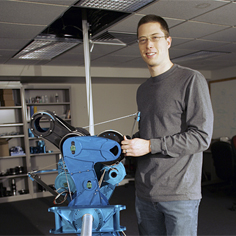
Armed with a fascination for dynamic systems and access to machining equipment in the university's Robotics Institute, Hurst designed a robot leg prototype that could one day help emergency personnel carry heavy objects — or even individuals who need assistance walking.
"It's a non-traditional approach to robot design," Hurst said, referring to his use of a cable and pulley system linked to large fiberglass springs. "From the motors to the legs, there are no gears. It's all steel cables." The fiberglass springs are used for a running gait, much like the springs in a pogo stick.
Hurst explains that robot designs typically use gear motors, which cannot create spring-like running behaviors; pneumatic actuators, which can be springy, but tend to be very difficult to control; or hydraulics, which can be very strong but are not exactly the best choice for a small, fast device.
By understanding the fundamentals of locomotion, he expects that exoskeletons could be designed to work with the dynamics of an individual's gait — assisting their movement using relatively little power.
"To date, most exoskeletons have used very large, high-power actuators, and have treated the wearer as a puppet that controls the motions of a robot," he explained. "I think this is largely because we do not yet fully understand the dynamics of walking and running. Once we do, the exoskeletons can be much smaller, less obvious and more useful."
As an undergrad and former president of Carnegie Mellon's Robotics Club, Hurst and his teammates won the Society of Automotive Engineers' Walking Machine Decathlon. The annual competition pits about 15 to 20 international teams against each other. The teams' walking robots are required to successfully navigate situations that include obstacles like slalom courses and trip wires.
"What's exciting to me about it is seeing something that you create actually do what you intended it to do," he said.
Hurst works in collaboration with University of Michigan Professor Jessy Grizzle, who has a National Science Foundation grant to study control methods for legged locomotion.
One robot leg is housed on Carnegie Mellon's Pittsburgh campus — a monopod named "Thumper." Two legs, bolted together to form a biped robot named "MABEL," reside in Grizzle's lab at the University of Michigan.
Related Links: Robotics Club
Homepage Story Archives